ESPACIO EUCLÍDEO
· Ángulo y distancia entre dos vectores
|
Temas relacionados: |
Hermann
Amandus Schwarz
Nació el 25 de enero de 1843 en Polonia y murió el 30
de noviembre en Alemania.
En 1866 Weierstrass estableció un puente entre la teoría
de superficies y la teoría de funciones analíticas.
Schwarz
había hecho una contribución importante en 1865, descubrió lo que ahora se
conoce como la superficie mínima de Schwarz.
Schwarz contestó a la cuestión de si una superficie mínima
dada realmente tiene un área mínima. Una idea de este trabajo, en el cual
construyó una función usando aproximaciones sucesivas, condujo Emile Picard a
su prueba de la existencia para las soluciones de ecuaciones diferenciales .
También contiene la conocida como desigualdad de
Schwarz
![]()
Sea E un espacio vectorial (e.v.). Se llama producto
escalar a una función real, denotada por <
, > y definida en E ´ E, tal que si x,
y, z son vectores de E y a es un número real, verifica:
A.1. < x,
y > = < y,
x >
(conmutativa)
A.2. < x+y,
z >
= < x,
z > + < y,
z >
(distributiva)
< x, y+z
> = < x, y
> + < x, z
> (distributiva)
A.3. < ax,
y > = a < x,
y > (asociativa)
< x, ay
> = a < x, y
> (asociativa)
A.4. < x,
x > ³ 0
< x, 0
> = 0
A5. < x, x
> = 0 si, y sólo si, x = 0
Si
< x,
y > = 0, para todo y,
entonces x = 0
Un espacio vectorial con un producto escalar se dice que es un espacio
vectorial euclídeo (espacio euclídeo). El producto escalar es una forma
bilineal (por las propiedades A2 y A3)
simétrica definida positiva, (por las propiedades A4 y A5).
![]()
Matriz de Gram del producto escalar respecto
de la base
B es una matriz
cuadrada G cuyos elementos son los productos escalares de los vectores de la
base considerada.
Sea B una base del espacio euclídeo E de dimensión n y G es la
matriz de Gram del producto escalar respecto a dicha base. Entonces:
i). G es simétrica
ii). G es invertible
iii). Si x¹0 es un vector de Ân,
entonces xTGx > 0
Nota: Cuando G cumple (iii) se denomina definida
positiva.
Supongamos que B={v1,v2,...vn} es una base en un espacio vectorial E, donde tenemos definido un producto escalar; la matriz de Gram respecto de B vendrá dada por:
![]()
Se llama norma o módulo de un vector x de un espacio euclídeo E, al número real no negativo
![]()
Sea E un espacio vectorial euclídeo. Entonces:
· ççx÷÷ = 0 si, y sólo si, x = 0
·
ççx +
y ÷÷ 2 +
ççx - y ÷÷ 2
= 2 (ççx÷÷2
+ ççy÷÷ 2)
Se dice que un vector z de un espacio euclídeo E, es normalizado, si
ççz÷÷ = 1
(también se le llama vector unitario).
Para cada
par de vectores x e y de un espacio vectorial euclídeo E, se verifica:
·
çáx, yñ÷
£ ççx÷÷ ççy÷÷
(Desigualdad de Cauchy – Schwarz)
çáx, yñ÷ = ççx÷÷ ççy÷÷ si y sólo si, el conjunto {x, y} es lin. dependiente
·
ççx + y ÷÷ £ ççx÷÷ + ççy÷÷
(Desigualdad triangular o de Minkowski)
ççx + y ÷÷ = ççx÷÷ + ççy÷÷ si, y sólo si, x = ay ó y
= ax con a ³ 0.
![]()
·
Ángulo
y distancia entre dos vectores
· Ángulo:
Definiremos el coseno del ángulo que forman dos vectores x e y de la forma siguiente:
· Distancia:
Definiremos la distancia entre los vectores x e y de un espacio euclídeo E como sigue:
d (x, y)
= ççx - y÷÷
Sean x
,y y z vectores cualesquiera de un espacio vectorial euclídeo E
·
d(x, y) ³ 0
·
d(x ,y) = 0 si, y sólo si,
x = y
·
d(x ,y) = d(y,
x)
·
d(x, y) £ d(x, z) + d(z,
y)
(D. triangular)
Una función que cumple estas cuatro condiciones recibe el nombre de espacio métrico.
![]()
Dos vectores x e y de un espacio euclídeo E se dice que son ortogonales si
áx,
yñ = 0
Se denota x
![]() y.
y.
Un conjunto de vectores {u1, u2,..., up} de un espacio euclídeo E se dice que es un conjunto ortogonal si
· áui , ujñ = 0
Si además todos los vectores
están normalizados, hablaremos de conjunto
ortonormal.
Todo conjunto ortogonal de un espacio euclídeo E
es linealmente independiente, pero el recíproco no es cierto.
Si {u1, u2,..., up} es una base ortogonal de un espacio euclídeo y x es un vector cualquiera de E, entonces
Sea
{u1, u2,..., up}
un conjunto linealmente independiente de un espacio euclídeo E. Existe un
conjunto ortonormal {w1,
w2,..., wp}
tal que:
Env {u1, u2,...,
up} =
Env {w1, w2,...,
wp}
Todo espacio euclídeo de dimensión finita no nula admite una base ortonormal.
![]()
F^ = {xÎE: <x,y>=0 para todo yÎF}
· F^ es un subespacio vectorial de E.
· F^ se
denomina complemento ortogonal
de F.
·
E = F Å F^
·
(F^)^
= F
·
dim E = dim F + dim
F^
![]()
Sea U = {u1,
u2,..., up}
una base de un espacio euclídeo E. Este algoritmo
construye una base ortogonal {v1,
v2,..., vp}
(respectivamente ortonormal: {w1,
w2,..., wp}) tal que:
Env
{u1, u2,...,
up} = Env {v1,
v2,..., vp}
![]()
etc.
( respectivamente:  )
)
![]()
· El vector z1
se llama proyección ortogonal
de z sobre F paralelamente a F^
(z1 = proyF(z)).
· El vector z2 es la componente ortogonal de z en F.
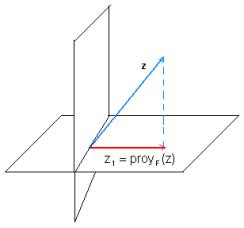
·
Teorema de la proyección
Si z es un vector de E, se descompone de forma única como
z = proyF(z) + z2
·
Teorema de
aproximación
Sea F un subespacio vectorial
de un espacio euclídeo E de dimensión finita. Si z es un vector de E y z1,
es la proyección de z sobre F
paralelamente a F^, entonces
ççz -
proyF(z) ÷÷
£
ççz -
u÷÷
para
todo vector u de F.
Nota: En esta desigualdad se basa la idea de la llamada aproximación por mínimos cuadrados.
· Matrices ortogonales
Una
matriz real Q de orden n se dice que es una matriz ortogonal si sus columnas son vectores ortonormales respecto al producto escalar canónico de Ân.
• Q es invertible, y en tal caso Q-1=QT
• QT es ortogonal
![]()
1) Dado el producto escalar definido en Â3, de la siguiente forma:
Calcula:
a) ![]()
b) La matriz de Gram respecto a la base canónica. (Base canónica es
la formada por los vectores {(1,0,0),(0,1,0, (0,0,1)} ).
c) La matriz de Gram respecto a la base B
' ={(1,1,1), (1,1,0), (1,0,0)}
d) La norma de los vectores:
![]()
e) El ángulo que forman los vectores:
![]()
f) Calcula m para que el
vector ![]() sea ortogonal a
sea ortogonal a ![]()
g) Contruye un vector unitario, a partir del vector ![]()
h) Comprueba la desigualdad
Cauchy-Schwarz con los vectores ![]()

Luego la matriz de Gram sería:

f). Los vectores no pueden ser ortogonales pues su
producto escalar es -4.
2) Resuelve el problema 1, pero considerando esta vez el producto escalar canónico en R3:
![]()
![]()
![]()
![]()
![]()
3).Considera la base de ![]() B={(1,0,2),(0,1,3),(0,0,1)} y el producto escalar canónico.
B={(1,0,2),(0,1,3),(0,0,1)} y el producto escalar canónico.
Obtén a partir de ella una base ortonormal.
![]()
Dividiendo cada unos de esos vectores por su módulo obtenemos una base ORTONORMAL.
![]()
Si disponemos estos tres vectores en columna obtendremos lo que se denomina una MATRIZ ORTOGONAL (su inversa coincide con la traspuesta)
4) Dado el subespacio de R3: H={(x,y,z) | x-y =0, z=0}.
Calcula H^ y la
proyección del vector ![]() de R3 sobre H.
de R3 sobre H.
![]()