Tema 2
Arquitectura de la familia AVR
Contenidos
Introducción
Familia AVR
Microcontrolador AVR
El ATmega2560 es el microcontrolador utilizado en la tarjeta Arduino MEGA 2560 (revisión 3).
Es el microcontrolador más potente de la familia:

Pinout microcontrolador

Pinout microcontrolador
Pinout microcontrolador
Pinout microcontrolador
Puerto general de E/S
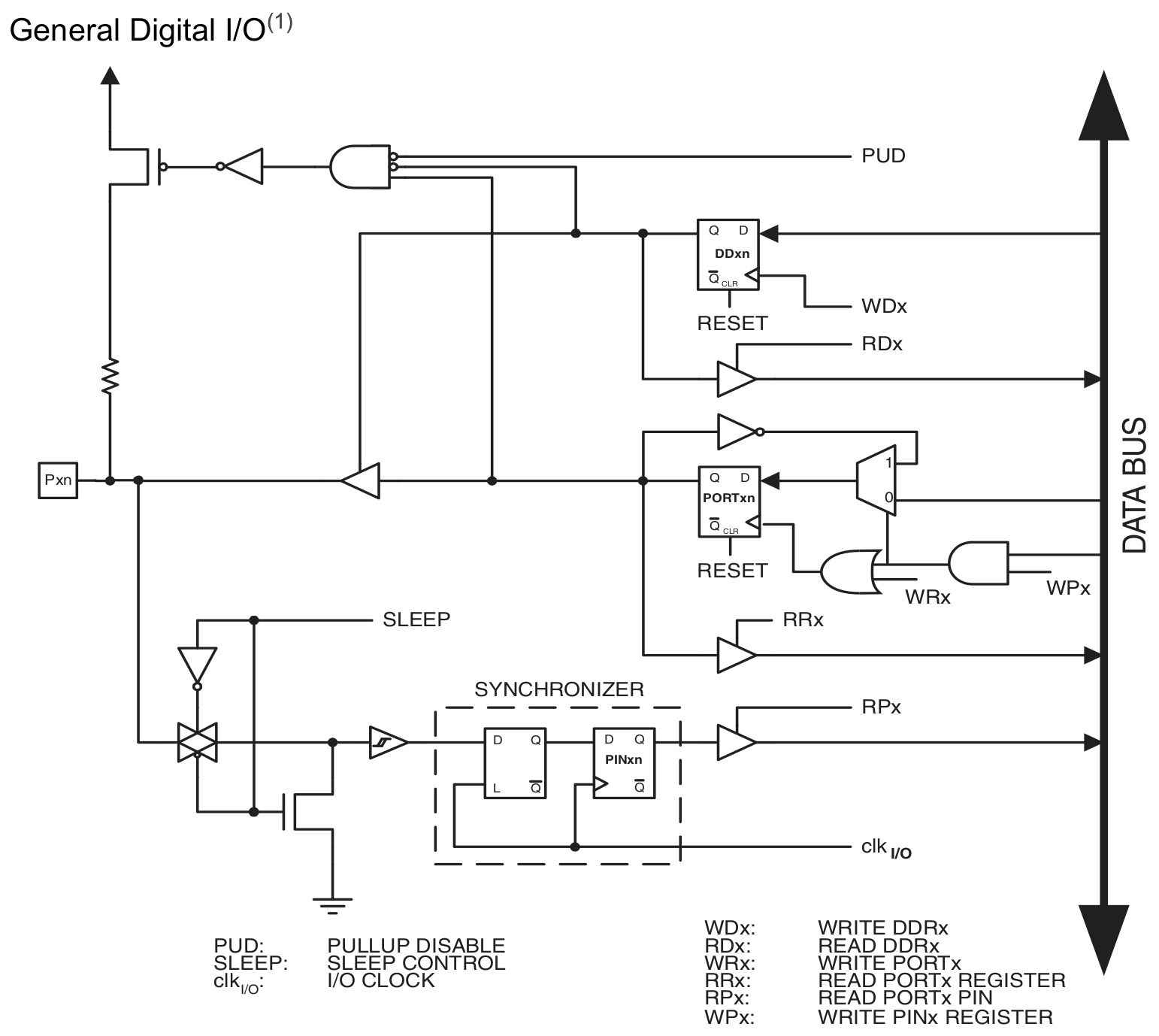
Diagrama de bloques
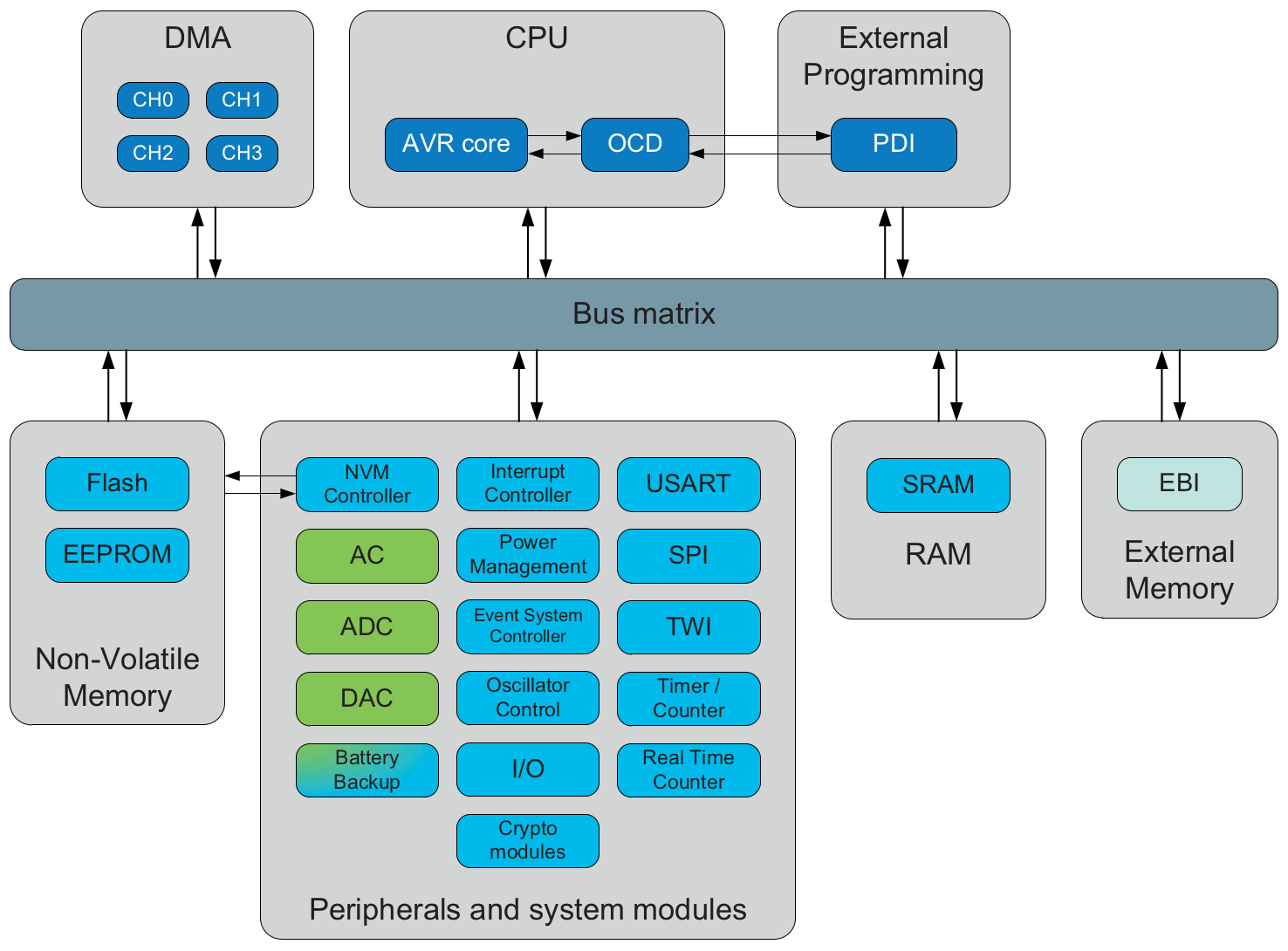
Diagrama de bloques completo
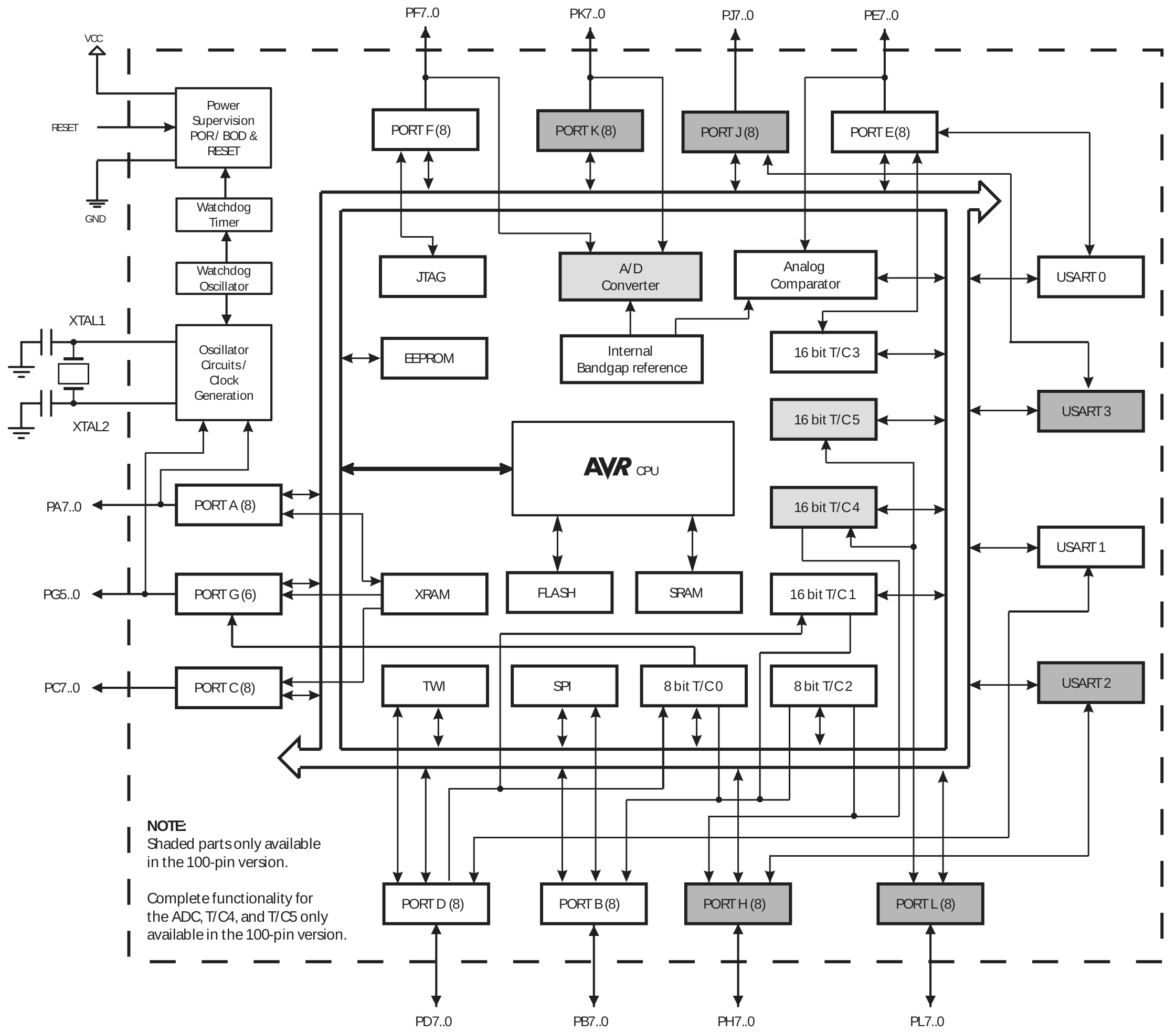
Diagrama de bloques CPU AVR
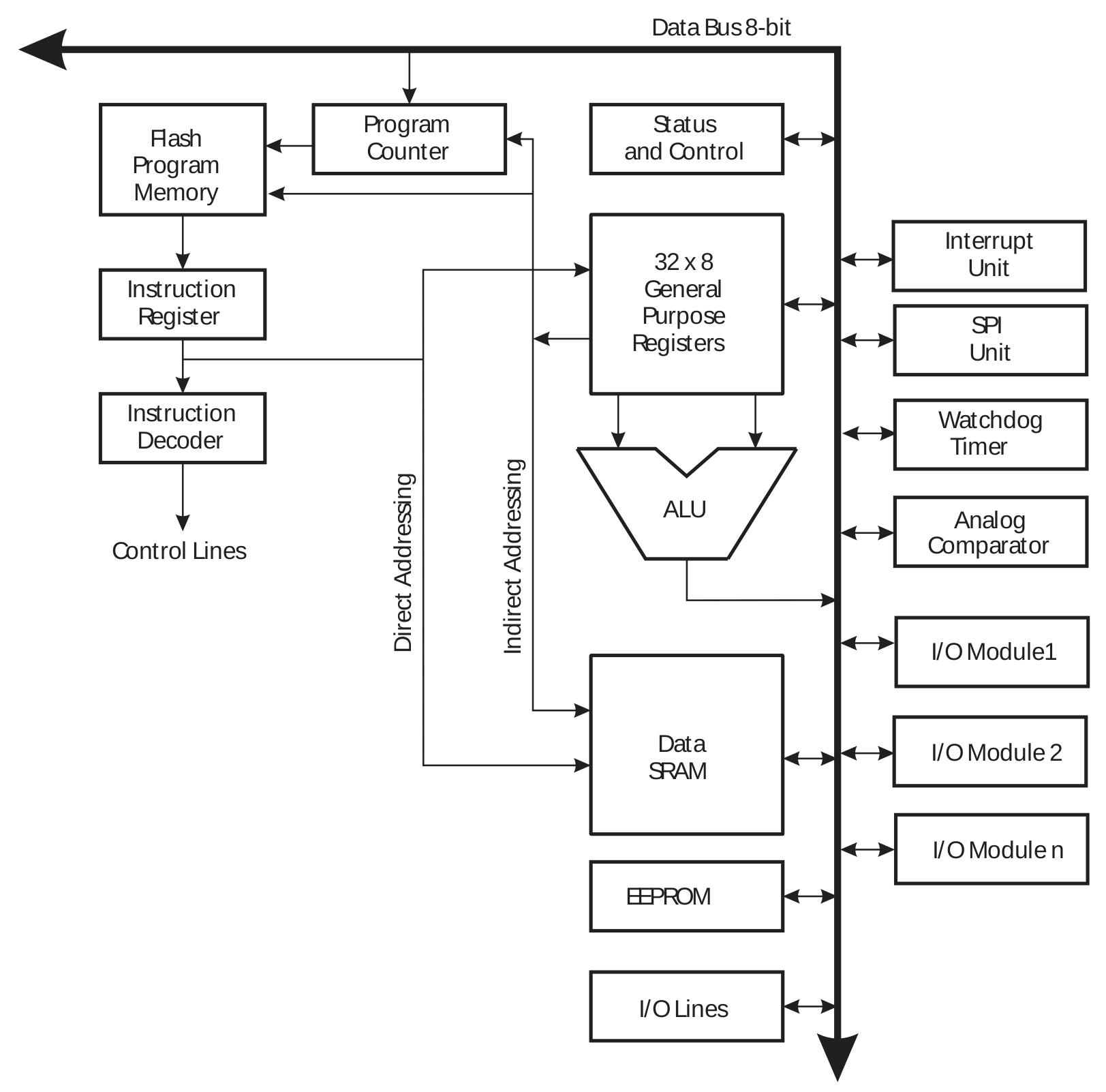
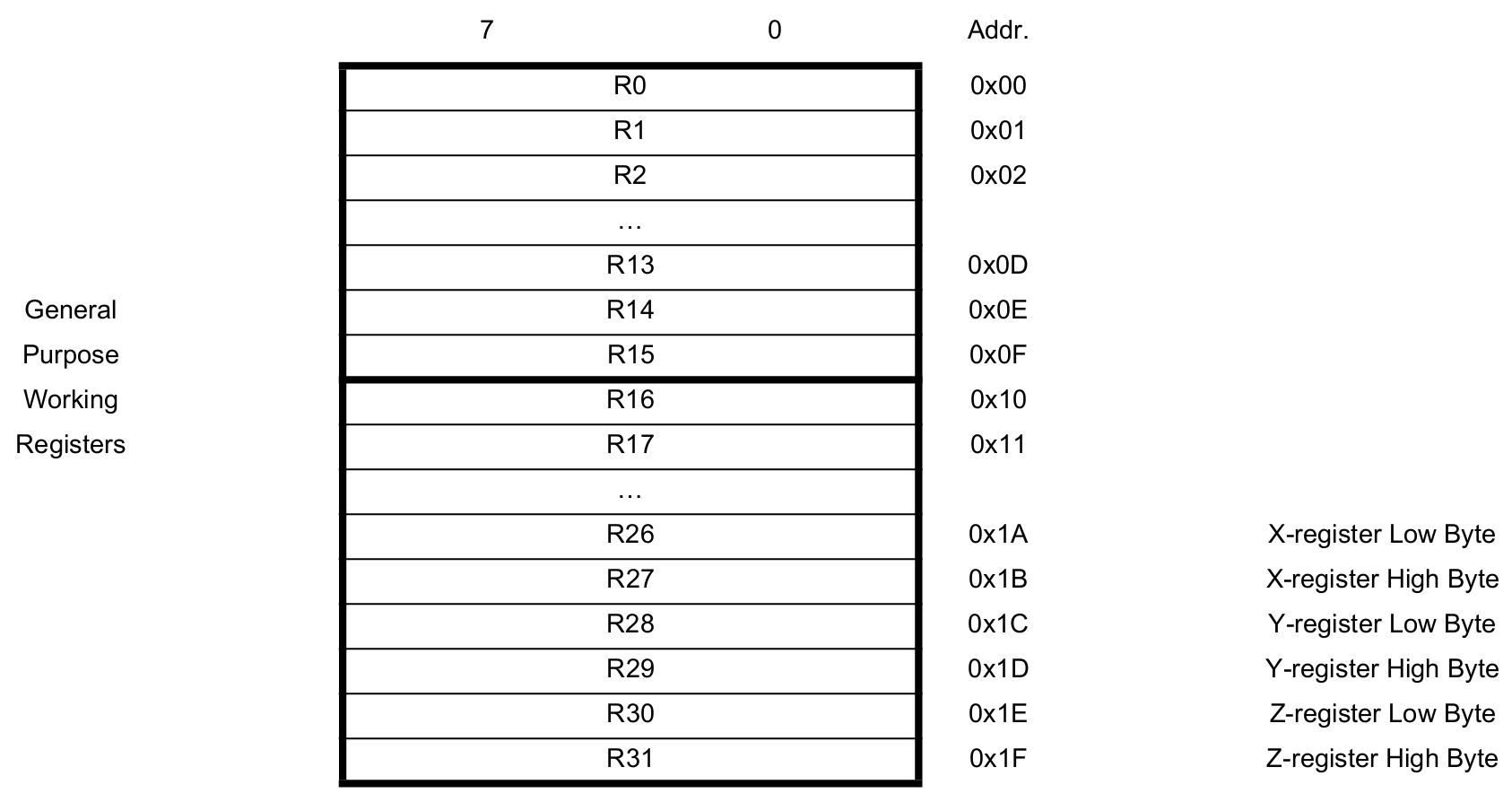
Arquitectura CPU AVR
Registros de propósito general
Unidad aritmético lógica
Registro de estado

- Bit 7 - I
Global interrupt Enable
- Bit 6 - T
Bit Copy Storage
- Bit 5 - H
Half Carry Flag
- Bit 4 - S
Sign Bit
Registro de estado
- Bit 3 - V
Two’s Complement Overflow Flag
- Bit 2 - N
Negative Flag
- Bit 1 - Z
Zero Flag
- Bit 0 - C
Carry Flag
Puntero de pila
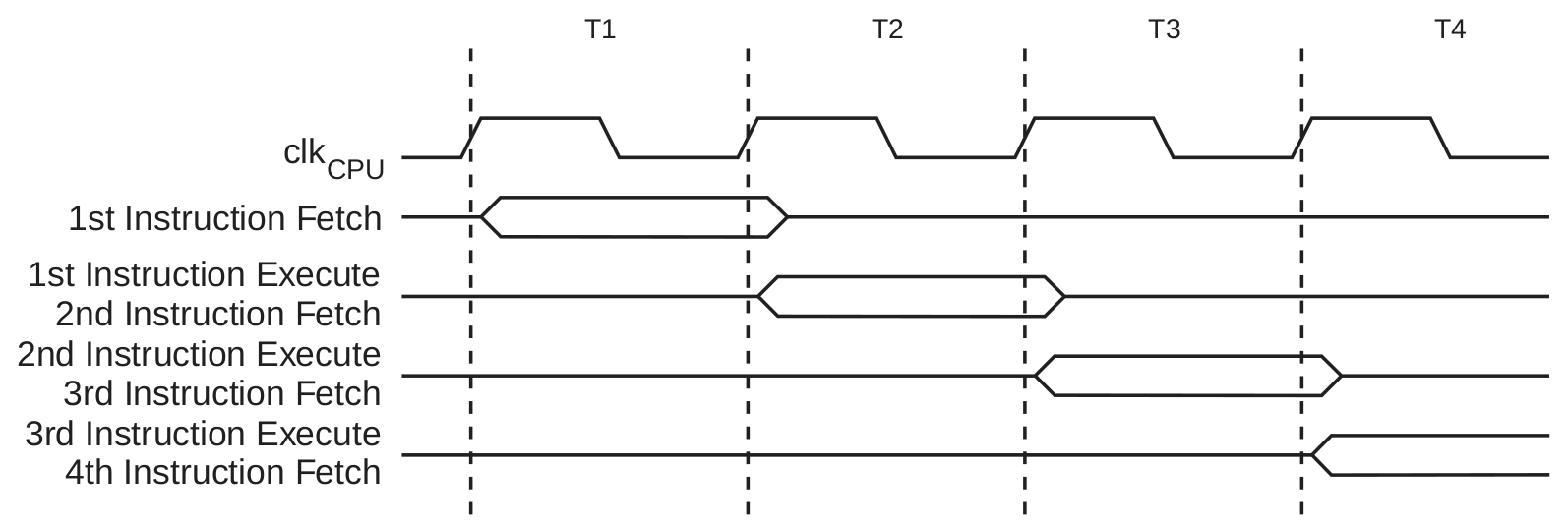
Ejecución de instrucciones
La CPU AVR utiliza directamente la señal de reloj (sin divisores internos).
La ejecución de instrucciones tiene un rendimiento máximo de 1 MIPS por MHz.
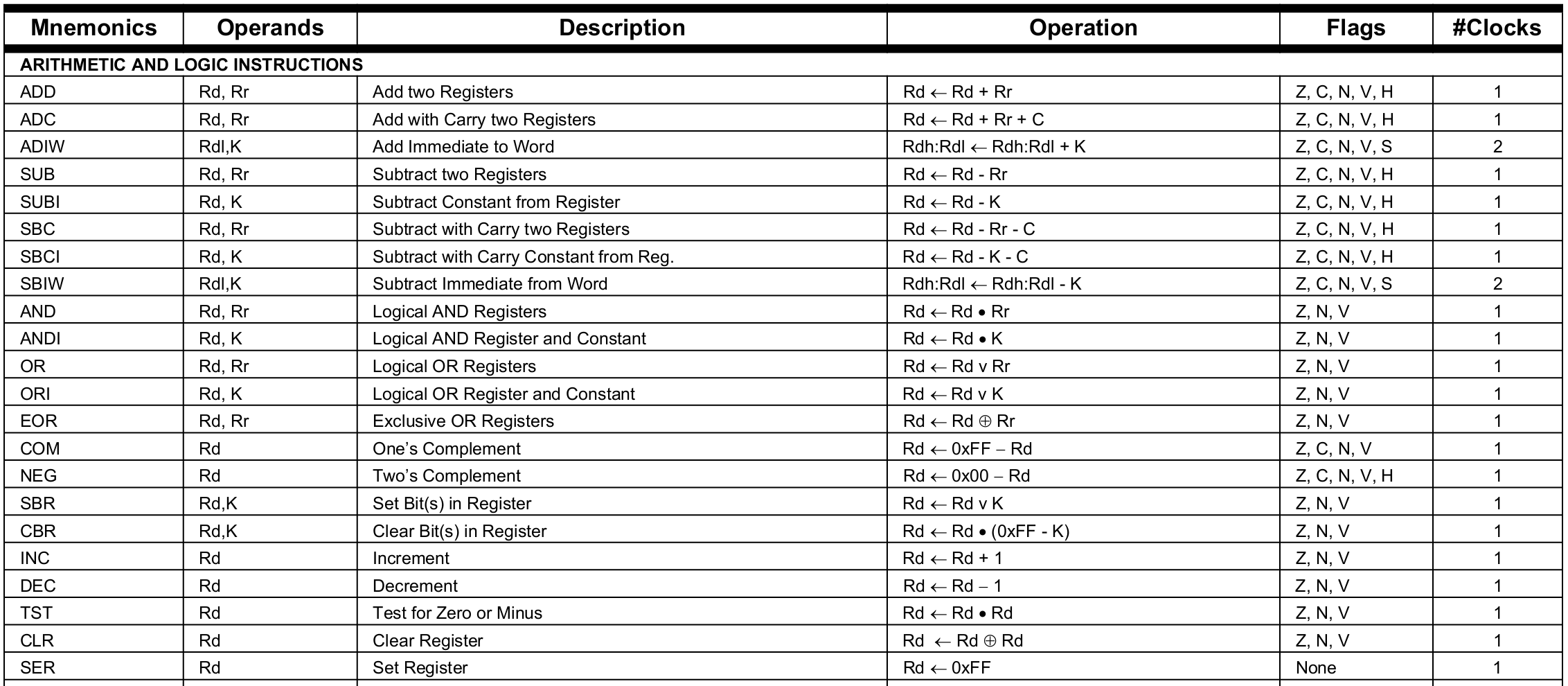
Juego de instrucciones
135 instrucciones (la mayor parte se ejecutan en un ciclo de reloj).
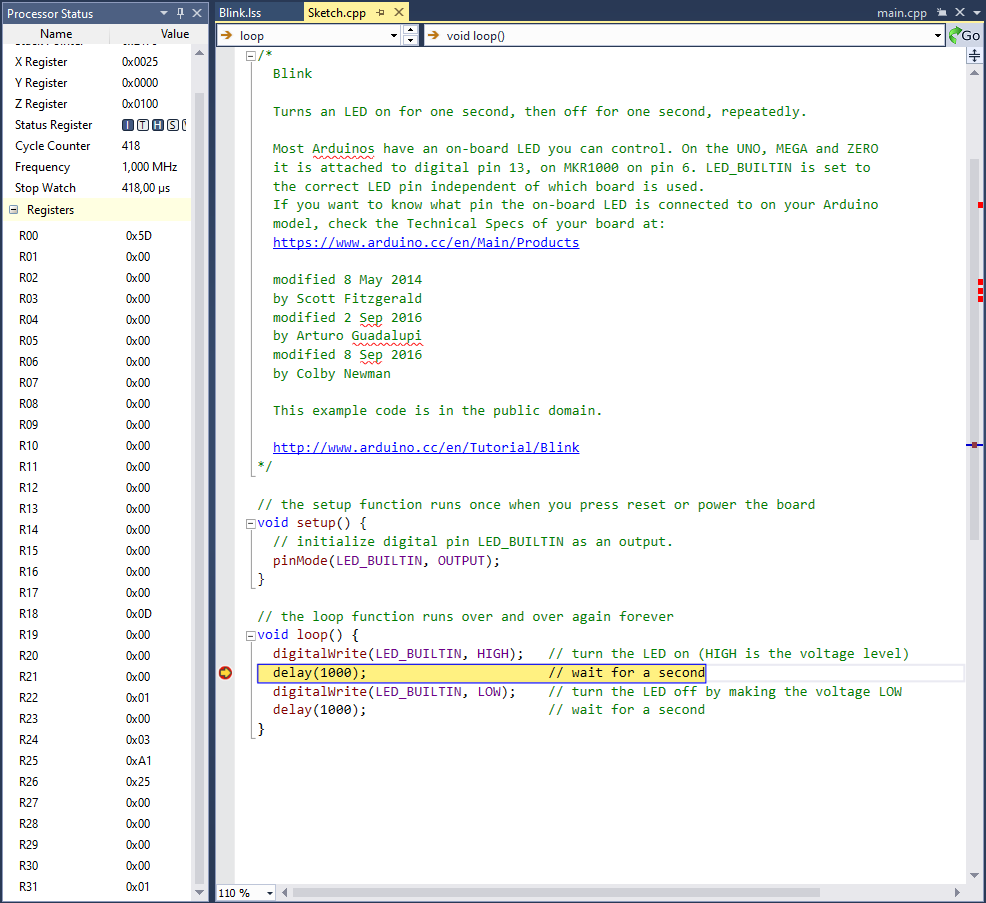
Ejemplo parpadeo led
Código fuente en lenguaje C:
Ejemplo parpadeo led
Código fuente en lenguaje ensamblador:
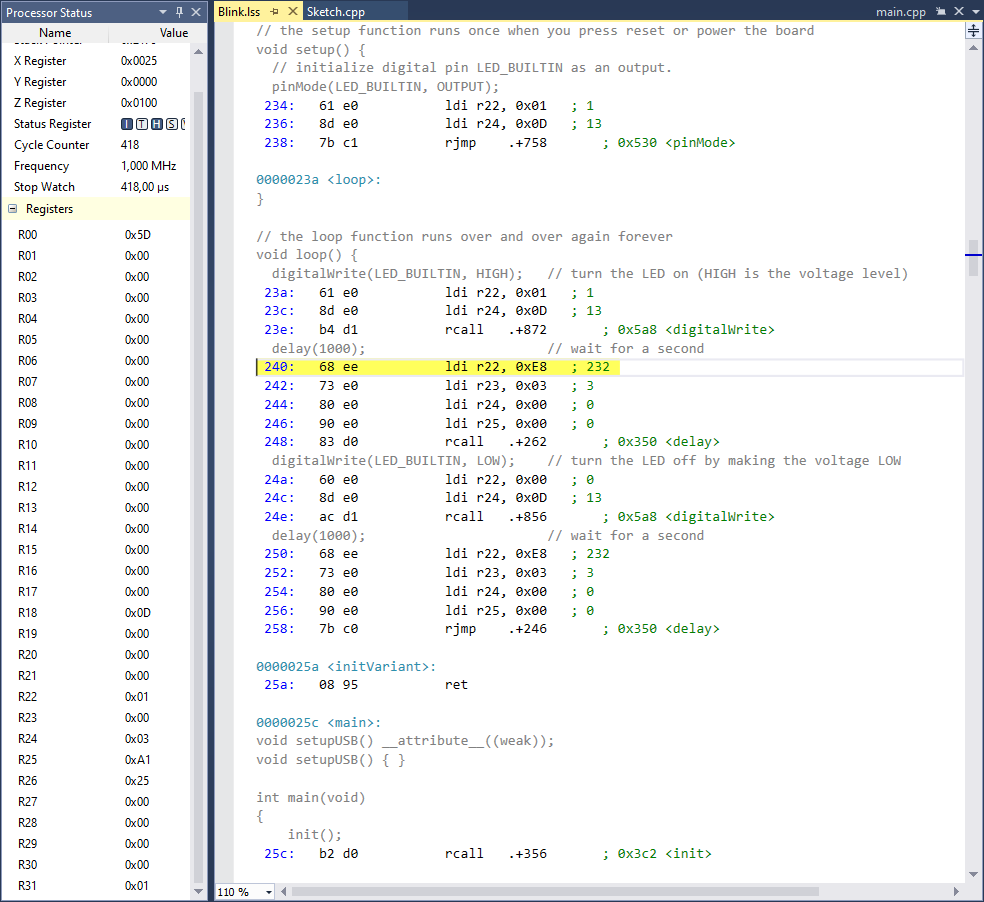
Ejemplo parpadeo led
Código fuente en lenguaje ensamblador:
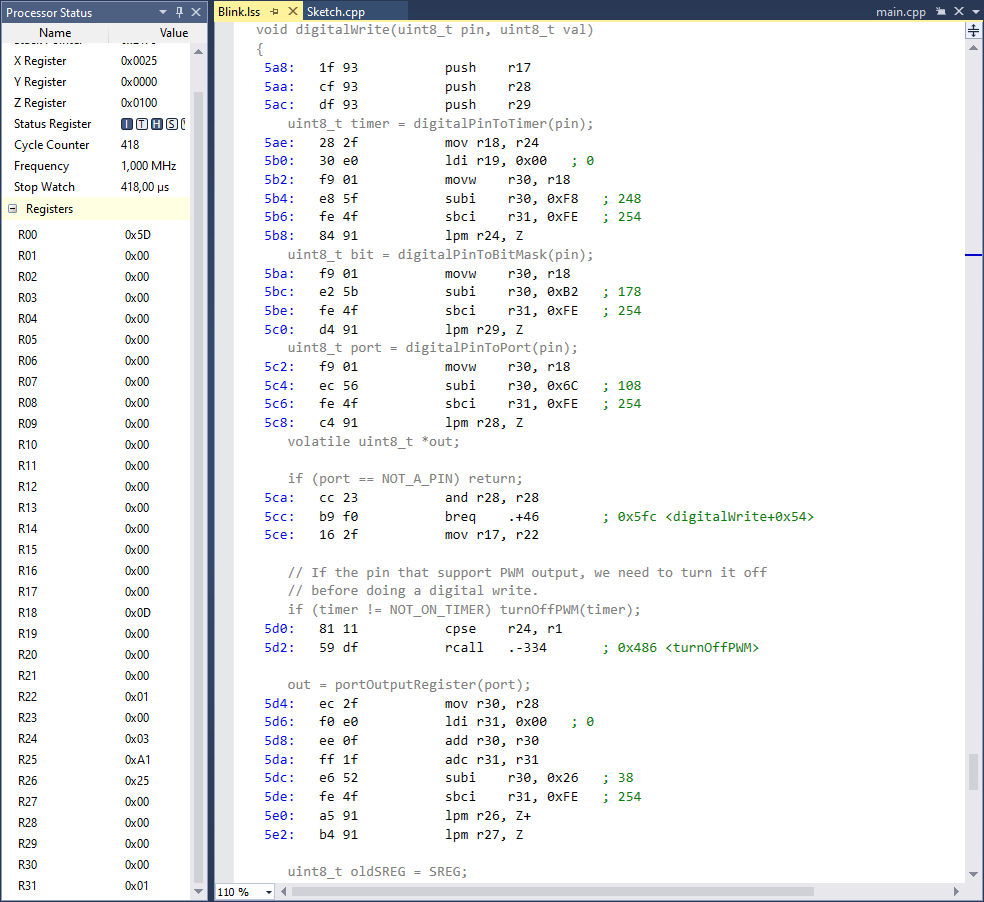
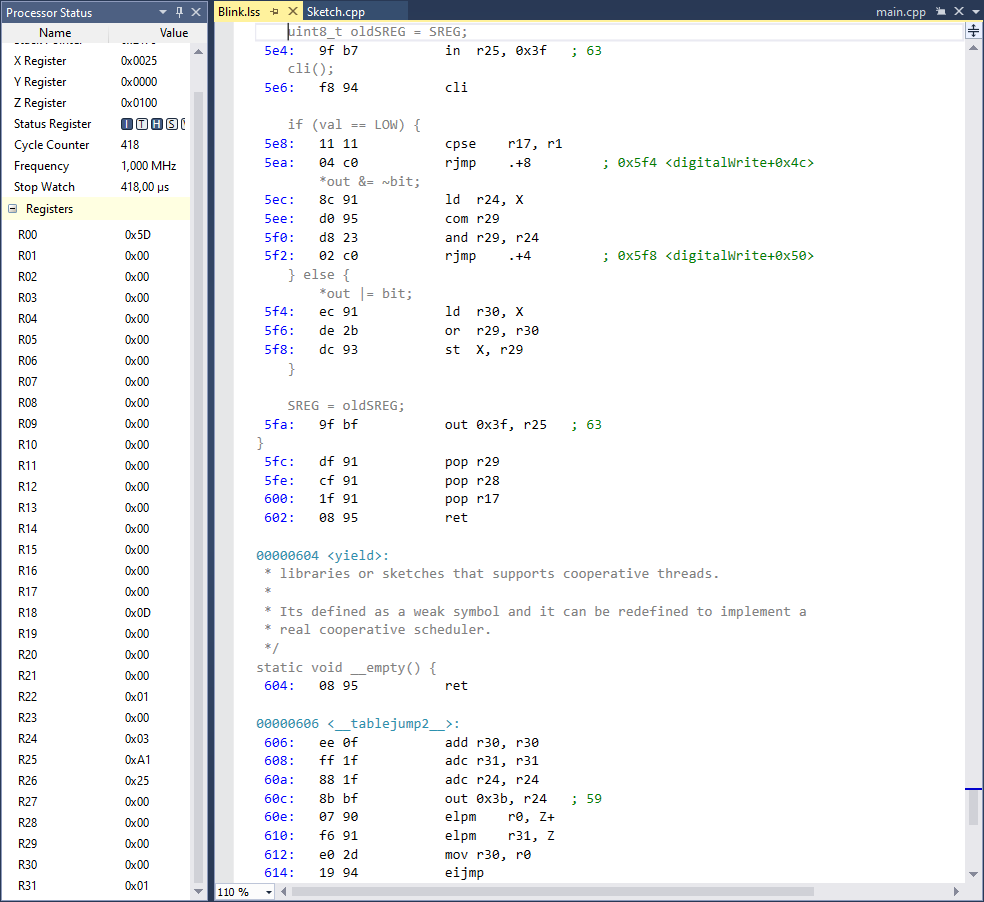
Ejemplo parpadeo led
Código fuente en lenguaje ensamblador:
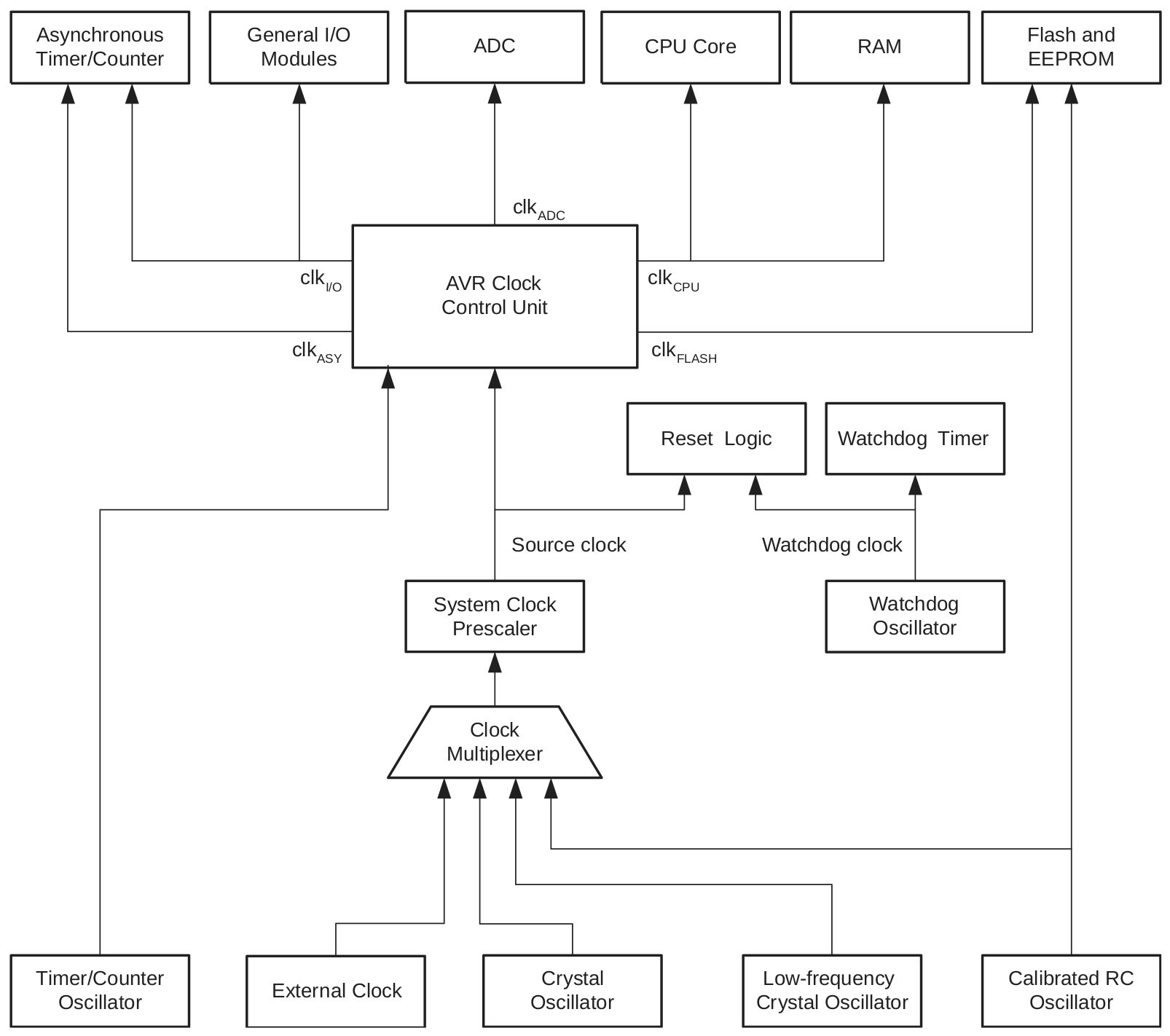
Distribución del reloj
Reset

Mapa de memoria
Mapa de memoria
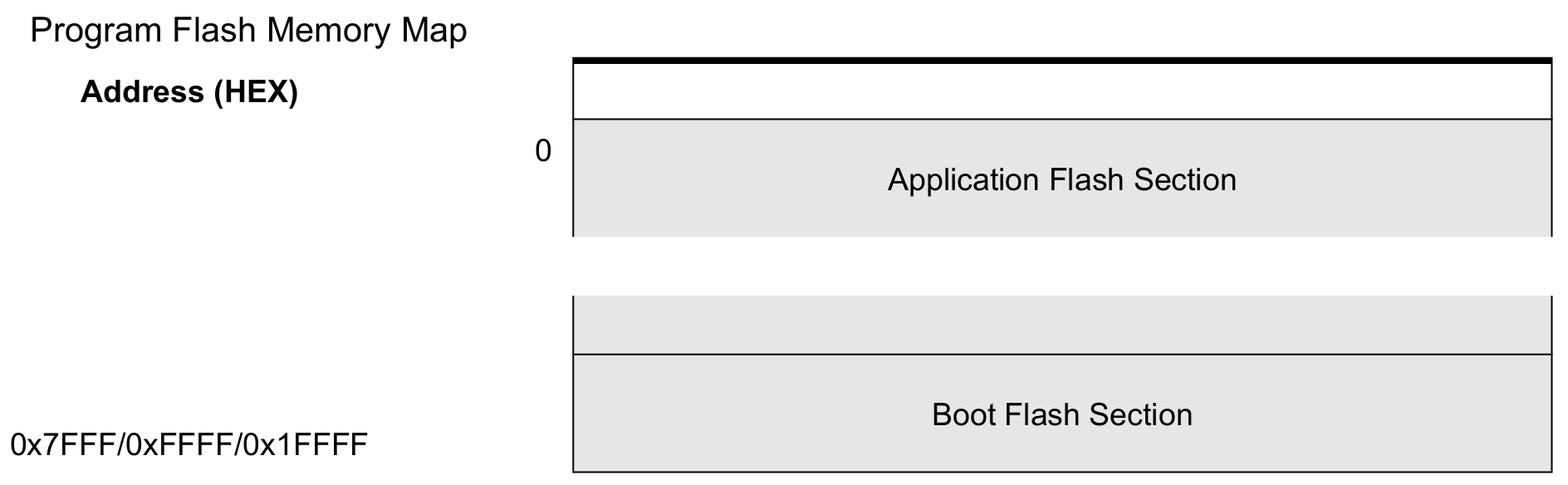
Memoria de program FLASH
Se divide en dos secciones: arranque y aplicación.
La memoria está organizada en 128K palabras de 16 bits.
El contador de programa (PC) tiene 17 bits.
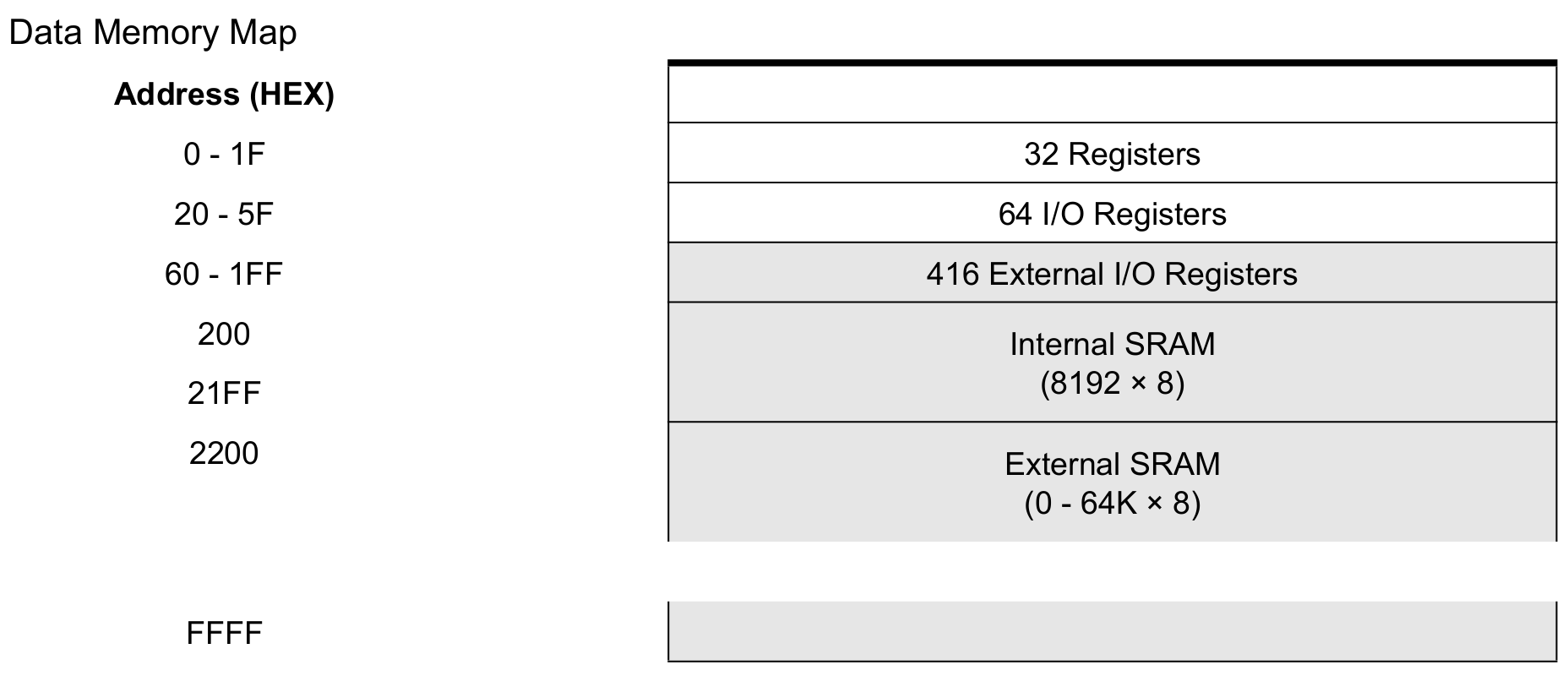
Memoria de datos SRAM
Los 8 KBytes de memoria de datos interna se pueden ampliar con una memoria externa de hasta 64 KBytes.
Interrupciones
Interrupciones
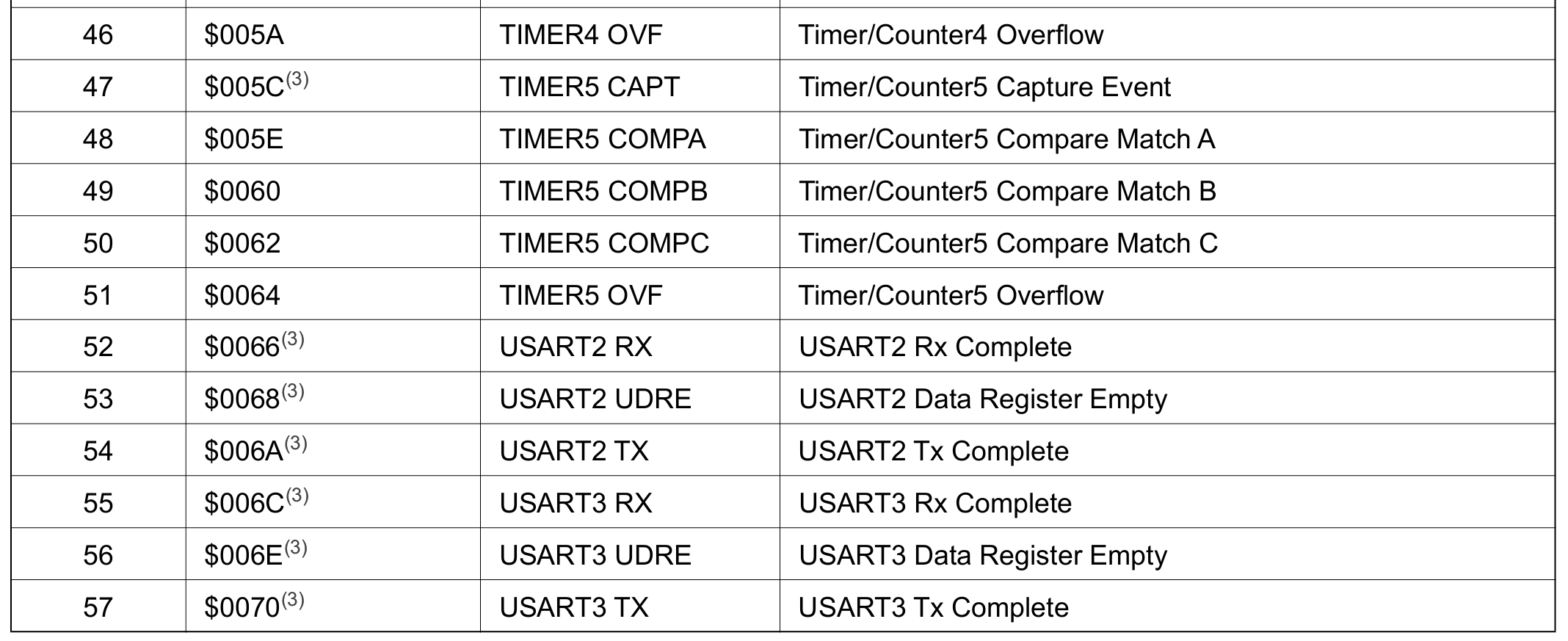
Vectores de interrupción
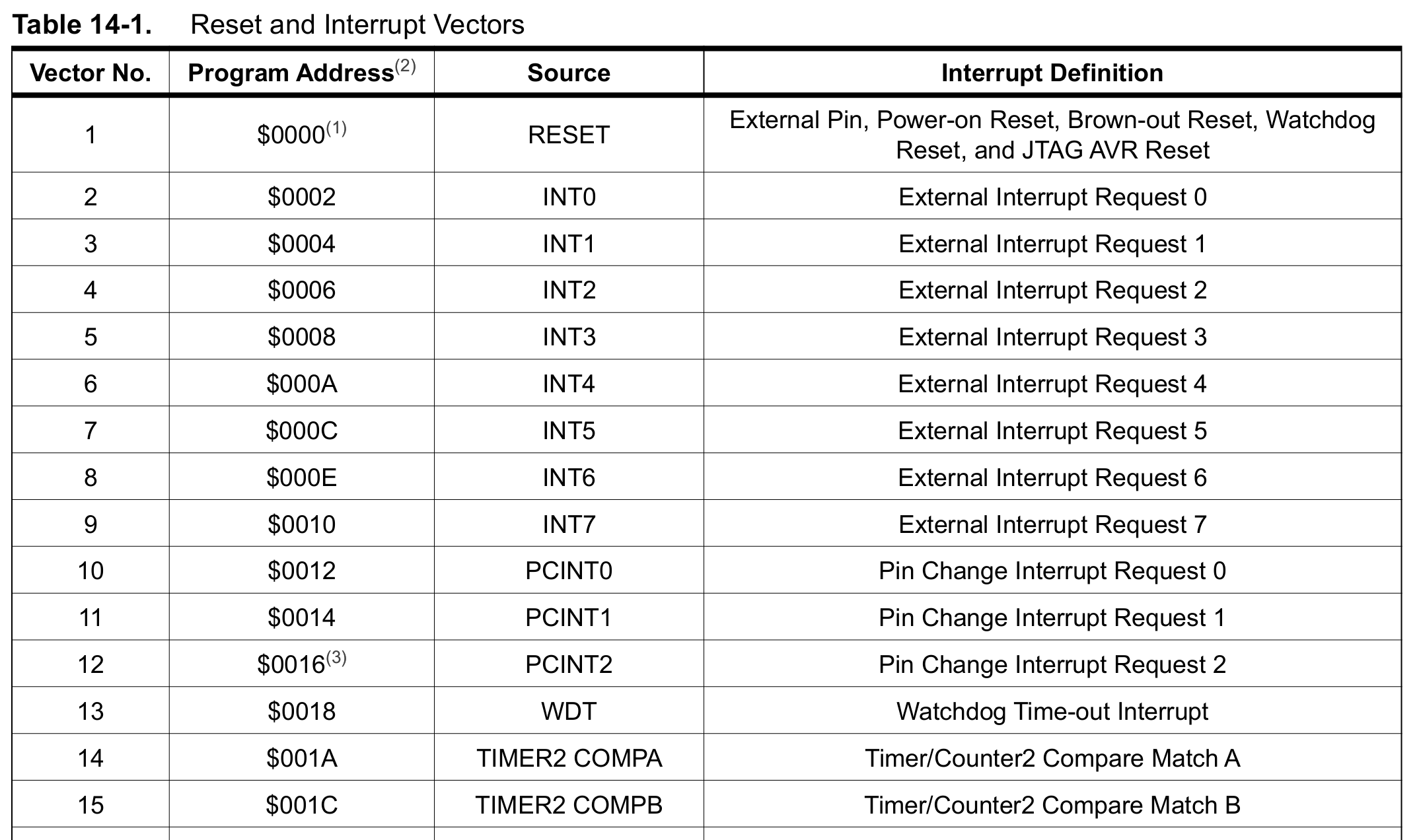
Vectores de interrupción
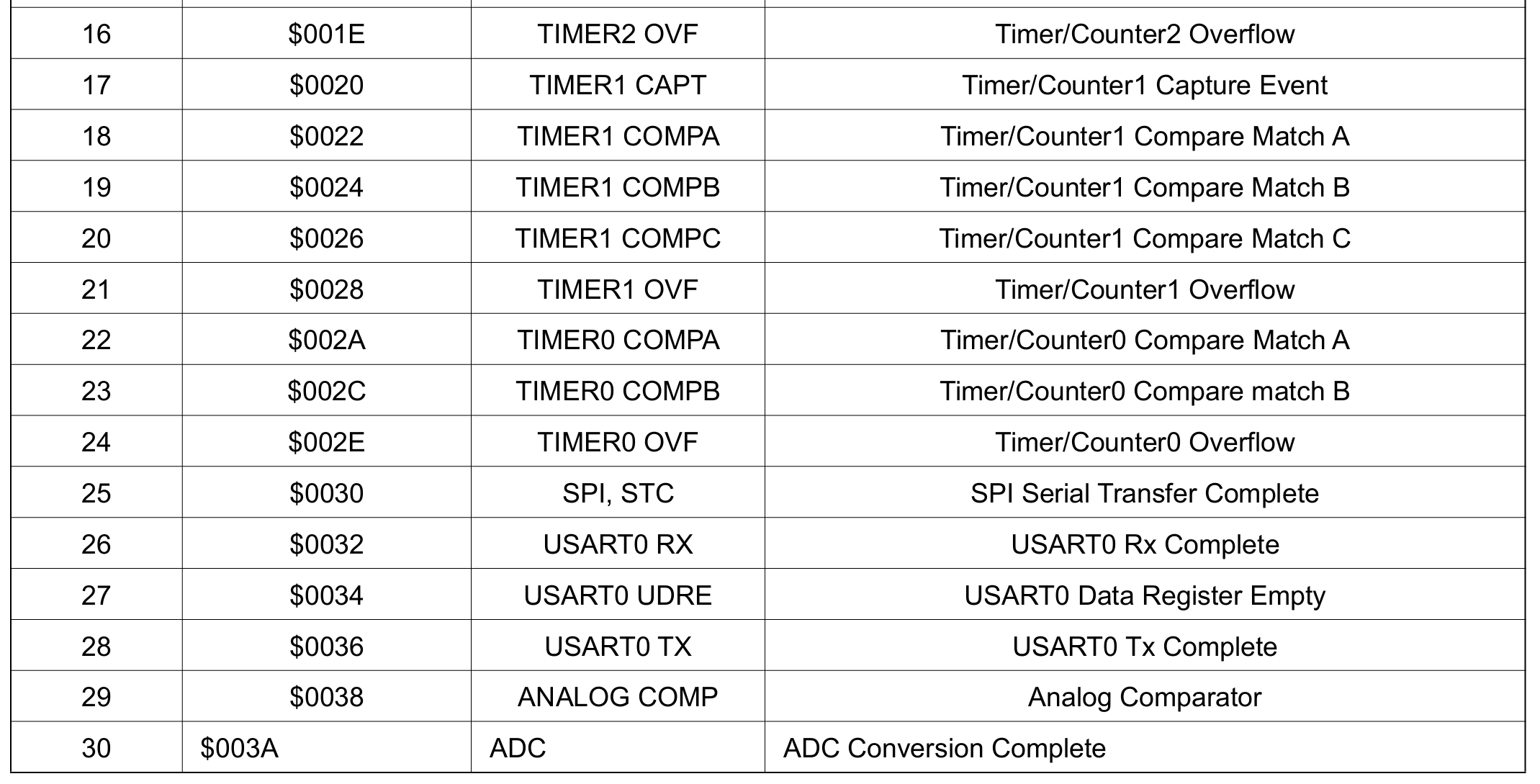
Vectores de interrupción
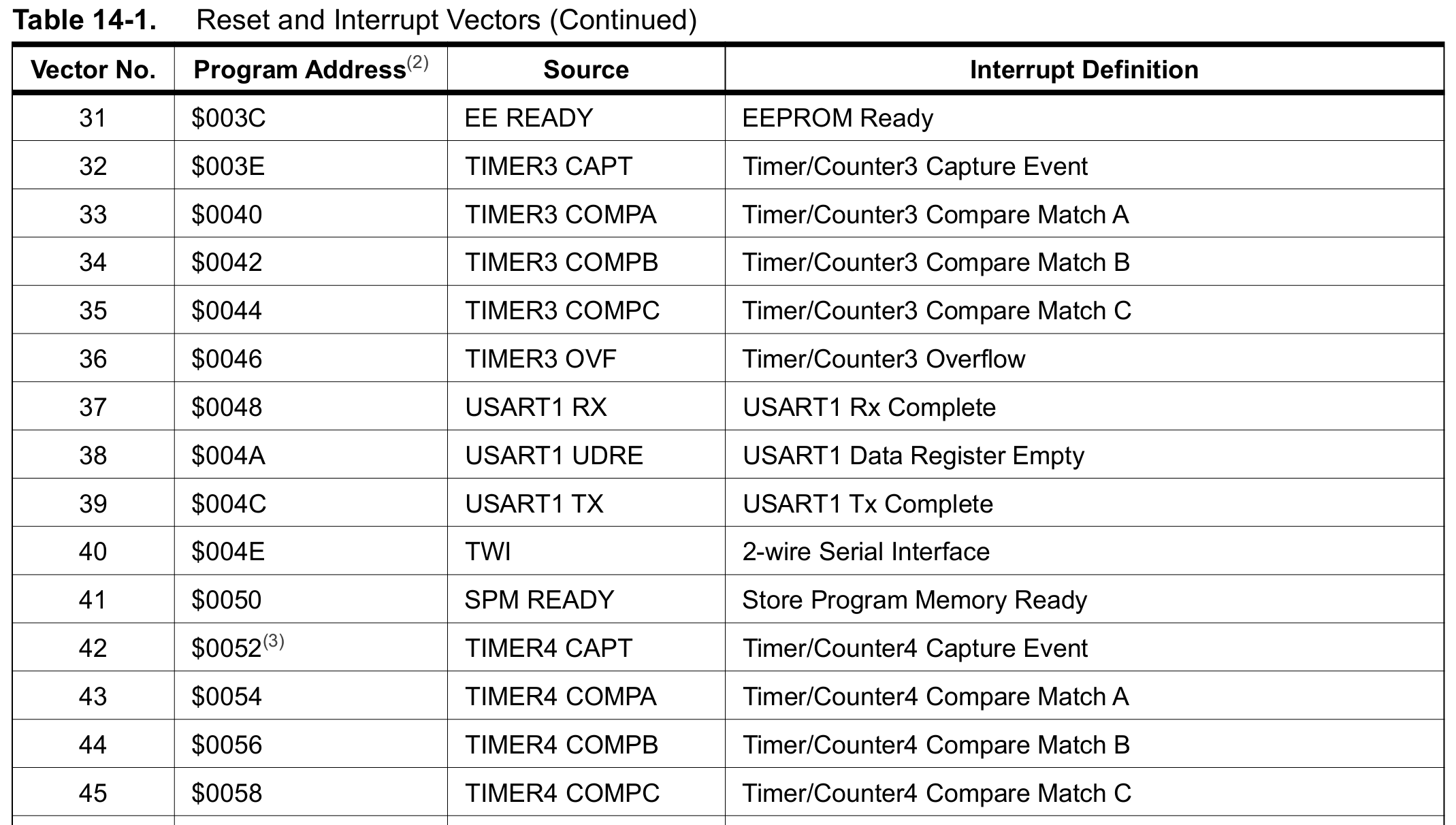
Vectores de interrupción
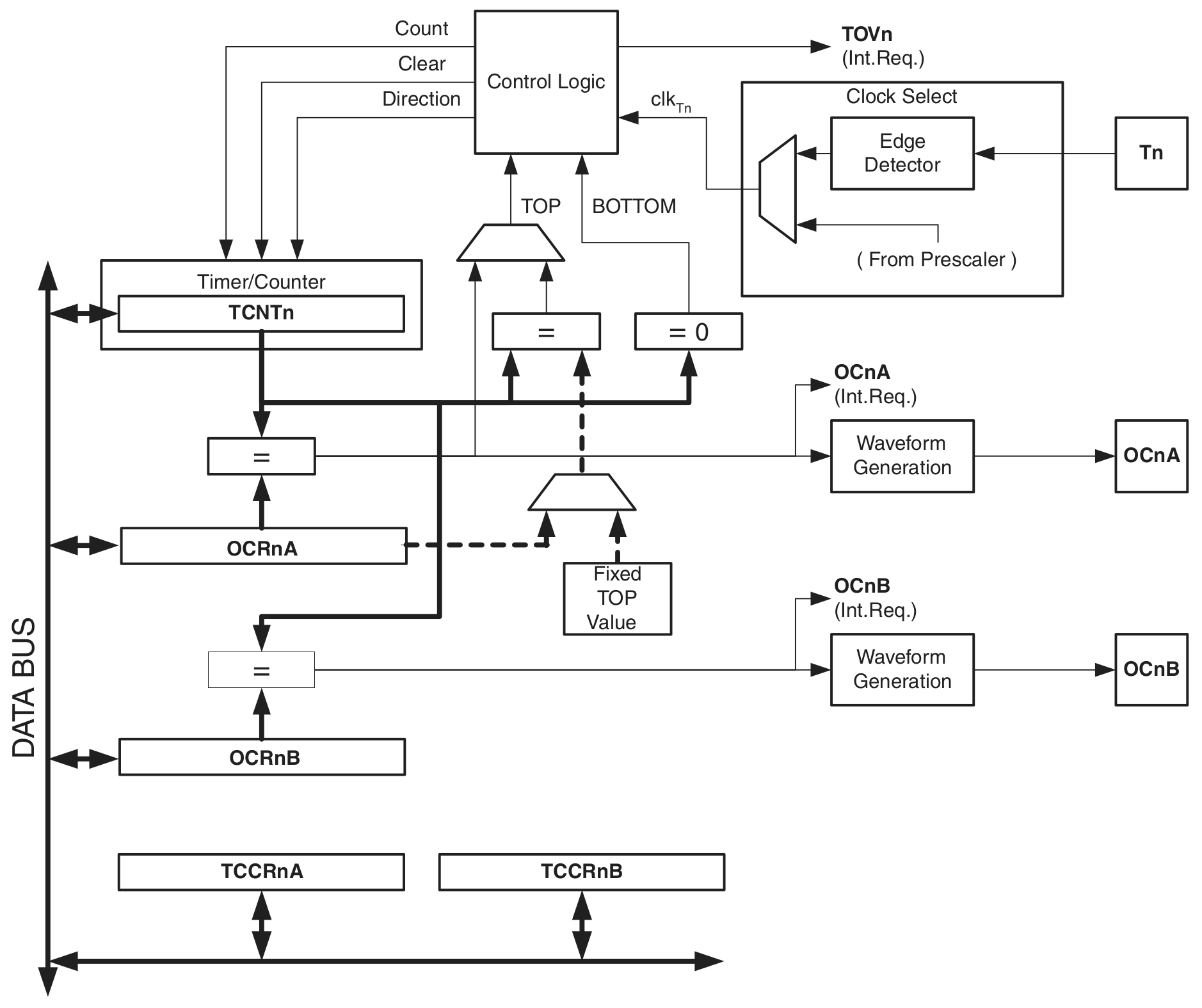
Temporizadores
Temporizadores
Temporizadores de 8 bits
Temporizadores de 16 bits
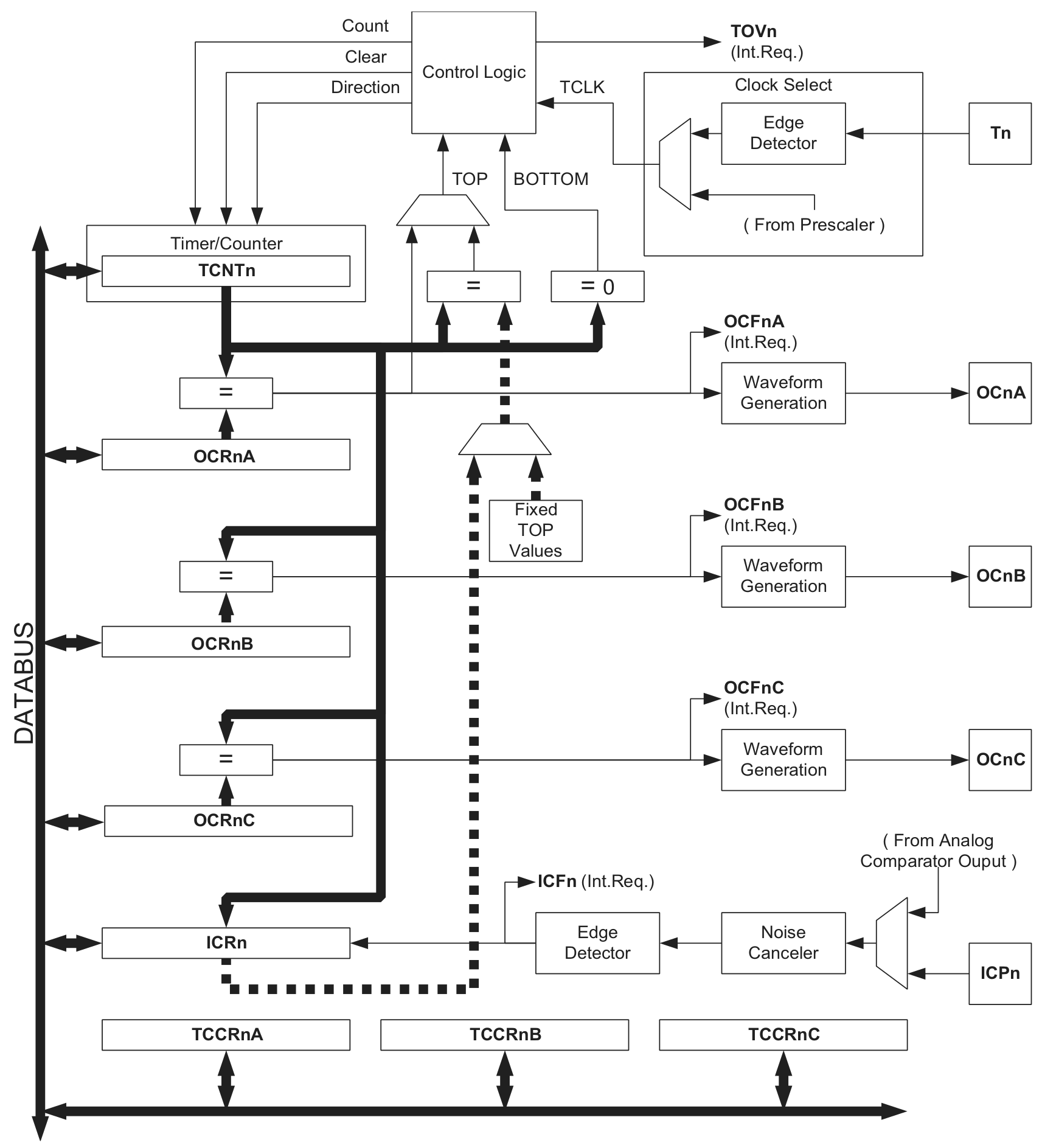
Salida PWM

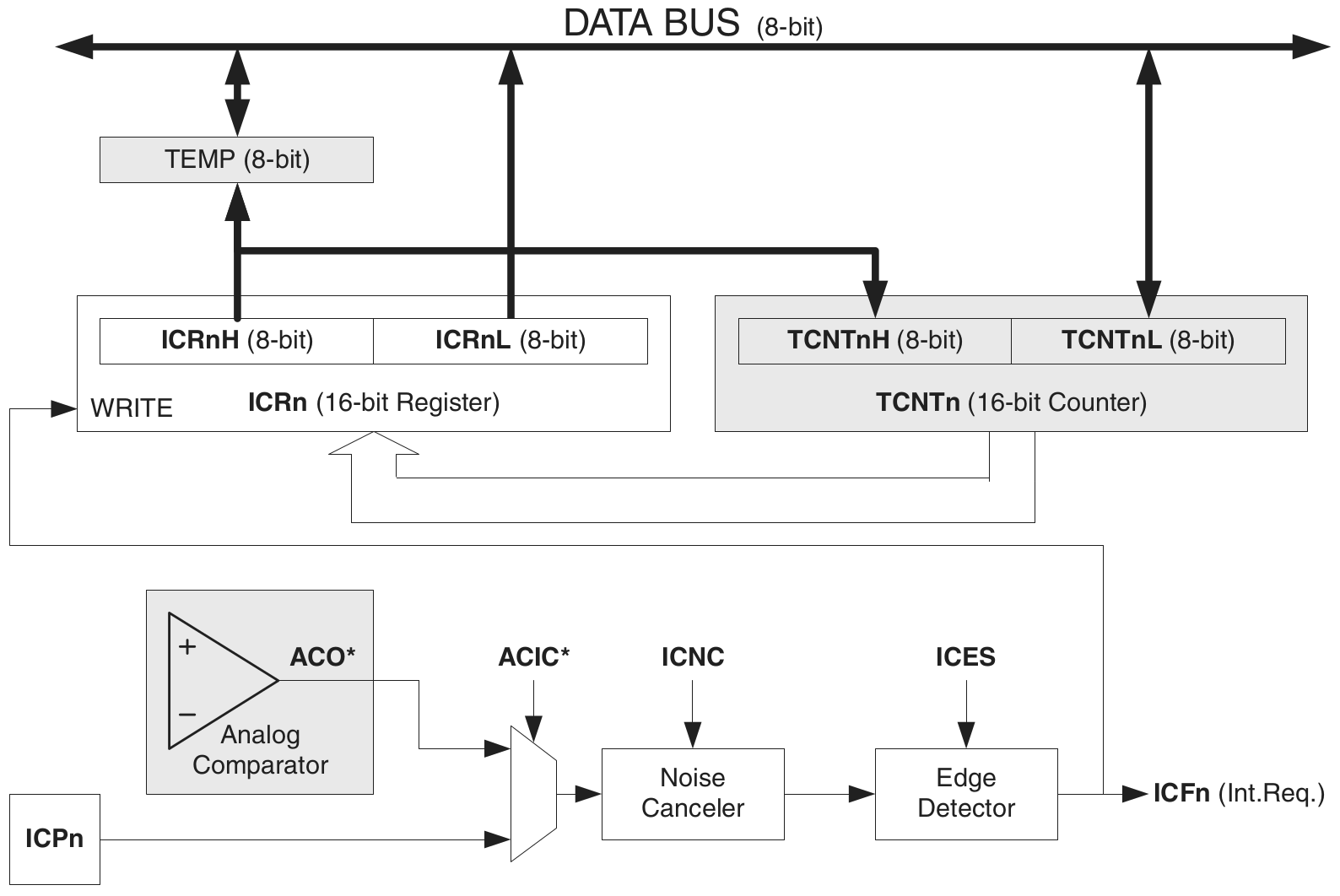
Captura de entrada
Watchdog
Watchdog
Temporizador del watchdog
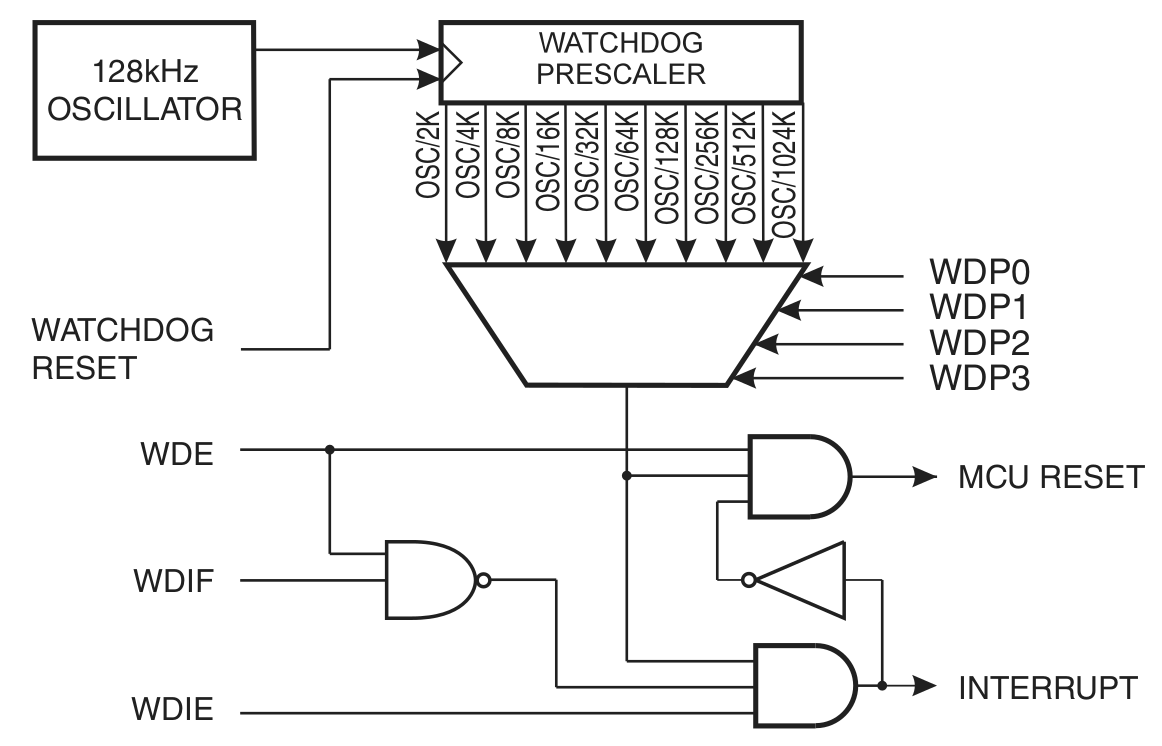
Reset del watchdog

Acceso directo a memoria (DMA)
Acceso directo a memoria (DMA)
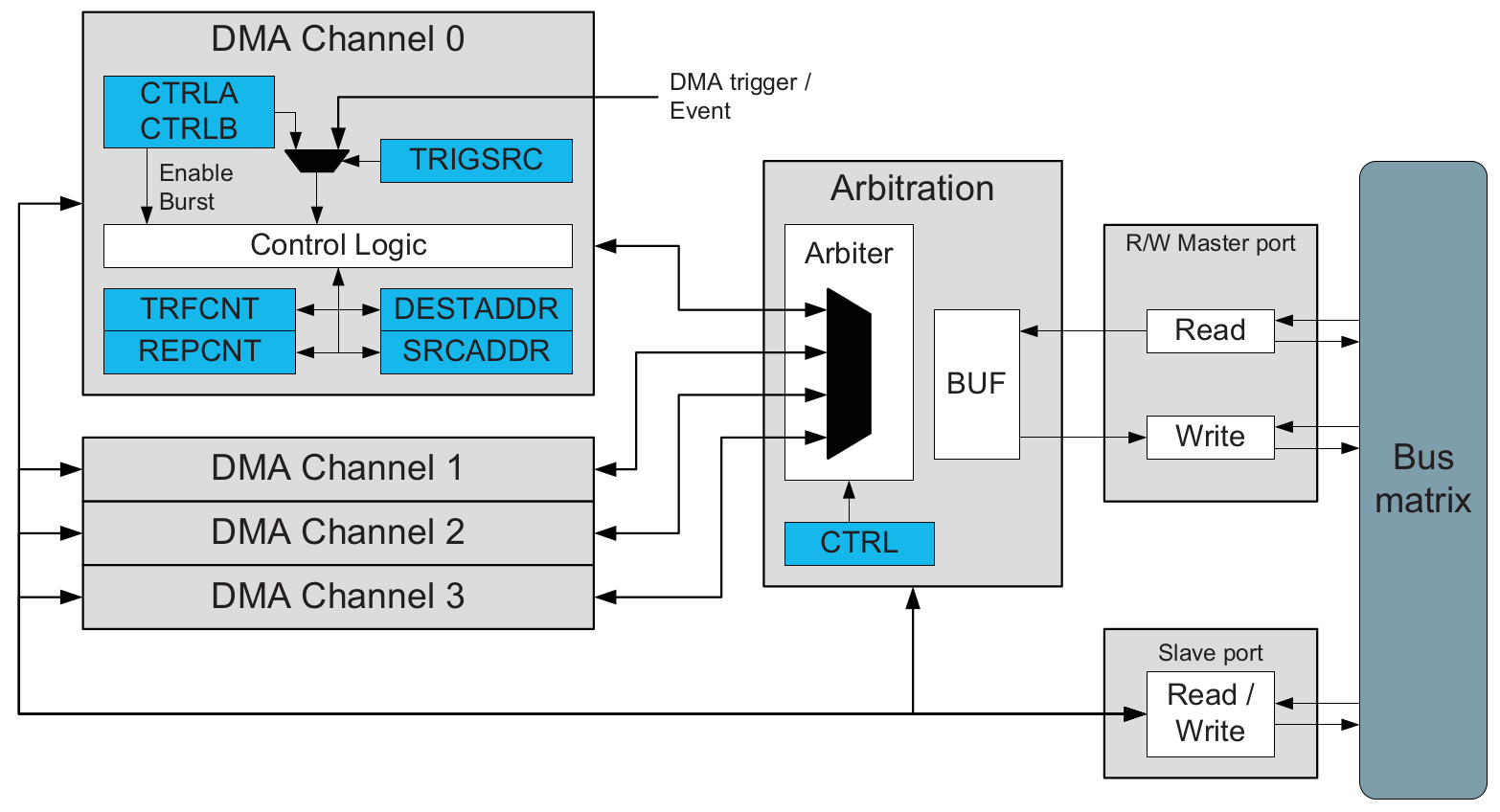
Acceso directo a memoria (DMA)
Acceso directo a memoria (DMA)
Periféricos internos
Periféricos internos
Convertidor A/D
Convertidor A/D

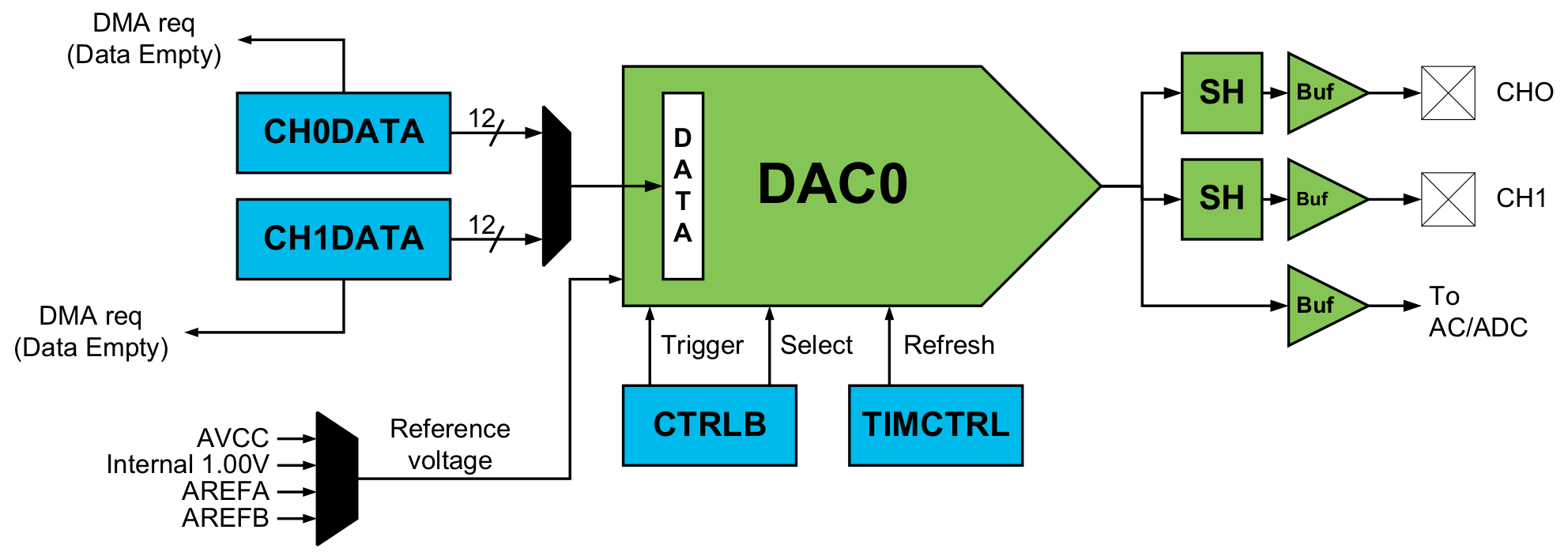
Convertidor D/A (ATxmega)
Convertidor D/A (ATxmega)