Serial.begin(speed);
Serial.begin(speed, config);Tema 5
Comunicaciones Cableadas en Sistemas Embebidos
© Germán Ramos (gramosp@eln.upv.es) |
Contenidos
Comunicaciones Cableadas: Necesidades
Comunicaciones Cableadas: Necesidades
Comunicaciones Cableadas: Tipos - Medio de comunicación
Medio de comunicación:
Cableados: conexiones entre los circuitos mediantes pistas en la placa de circuito impreso (PCB) o mediante cables tal y como realizamos en las prácticas.
Estas son las comunicaciones que estudiaremos en este tema: UART, I2C, SPI.

Comunicaciones Cableadas: Tipos - Medio de comunicación
Medio de comunicación:
Inalámbricos: conexiones por radiocomunicaciones en distintas bandas de frecuencias y protocolos.
Normalmente empleadas para conectar el sistema embebido con dispositivos externos.
Estas comunicaciones se introducirán en el tema siguiente: WiFi, Bluetooth.

Comunicaciones Cableadas: Tipos - Serie/Paralelo
Bus Serie / Paralelo:
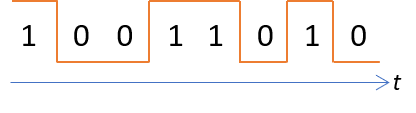
Serie: La información entre los dispositivos se envía bit a bit uno tras otro, requiriendo varios envíos secuenciales para enviar bytes (8x) o palabras mayores de 16, 32 o 64 bits.
Son hoy en día las comunicaciones más empleadas al requerir muy pocos pines de los circuitos integrados.
Ejemplo de envío del byte 1011001 con el LSB (Least Significant Bit) primero:
Comunicaciones Cableadas: Tipos - Serie/Paralelo
Serie / Paralelo:
Paralelo: La información entre los dispositivos se envía en bloques de bits (8, 16, 32 bits) unos tras otros.
Envían más información que la comunicación serie, pero requiere de más pines y líneas (pistas en la PCB).
Empleadas principalmente en las memorias donde sí es necesario un gran flujo de datos.

Comunicaciones Cableadas: Tipos - Síncrono/Asíncrono
Síncronas / Asíncronas:
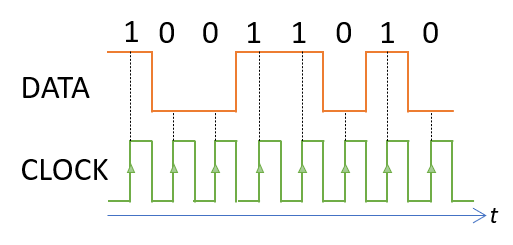
Síncronas: Además de las líneas (pines) con los bits de datos, se añade una línea de reloj CLOCK que sincroniza el avance de los bits de datos y la lectura de los mismos.
CLOCK es gobernada por el Master (luego lo veremos).
Los datos se muestrean por el receptor en un flanco de reloj (normalmente subida) y avanzan hacia el siguiente bit en el otro flanco (normalmente bajada).
Los protocolos I2C y SPI son serie-síncronos.
Comunicaciones Cableadas: Tipos - Síncrono/Asíncrono
Síncronas / Asíncronas:
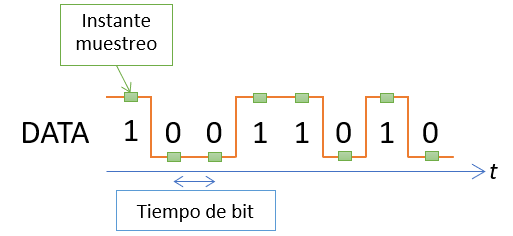
Asíncronas: En este caso los datos se envían de transmisor a receptor sin señal de reloj, sin información de sincronía entre ellos.
Es necesario conocer previamente la tasa de bits por segundo y alguna referencia inicial temporal para poder saber en el receptor cuando muestrear el valor del bit.
El protocolo UART es serie-asíncrono.
Comunicaciones Cableadas: Tipos - Topología
Topología: 1:1 / 1:N:
1:1: Comunicación desde 1 transmisor a 1 único receptor. No se permite compartir las líneas ni de datos ni de reloj si es una conexión síncrona.
El protocolo UART es de topología 1:1.
Comunicaciones Cableadas: Tipos - Topología
Topología: 1:1 / 1:N:
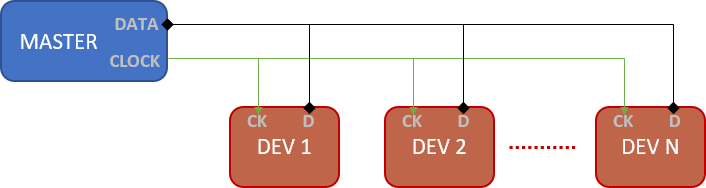
1:N: Comunicación desde 1 transmisor a N posibles receptores. Sí se permite compartir las líneas de datos y de reloj.
Solo puede haber 1 transmisor a la vez para evitar cortocircuitos en las líneas de datos y/o reloj.
Debe haber un arbitraje para saber quién hace una petición de datos Master y quién responde (Slave) de todos los demás.
Los protocolos I2C y SPI son de topología 1:N.
Comunicaciones Cableadas: Tipos - Full-Duplex/Half-Duplex
Full-Duplex / Half-Duplex:
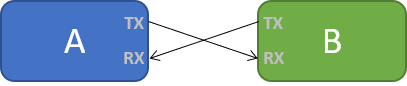
Full-Duplex: Existen líneas de comunicación independientes para transmisión TX y recepción RX.
Es posible transmistir y recibir de forma simultánea.
Los protocolos UART y SPI son Full-Duplex.
Comunicaciones Cableadas: Tipos - Full-Duplex/Half-Duplex
Full-Duplex / Half-Duplex:
Half-Duplex: Existe una única línea de comunicación de datos empleada de forma alterna en el tiempo para la transmisión y recepción.
No es posible transmistir y recibir de forma simultánea.
Es necesario establecer un sistema de arbitraje para el uso de la línea de datos.
El protocolo I2C es Half-Duplex.
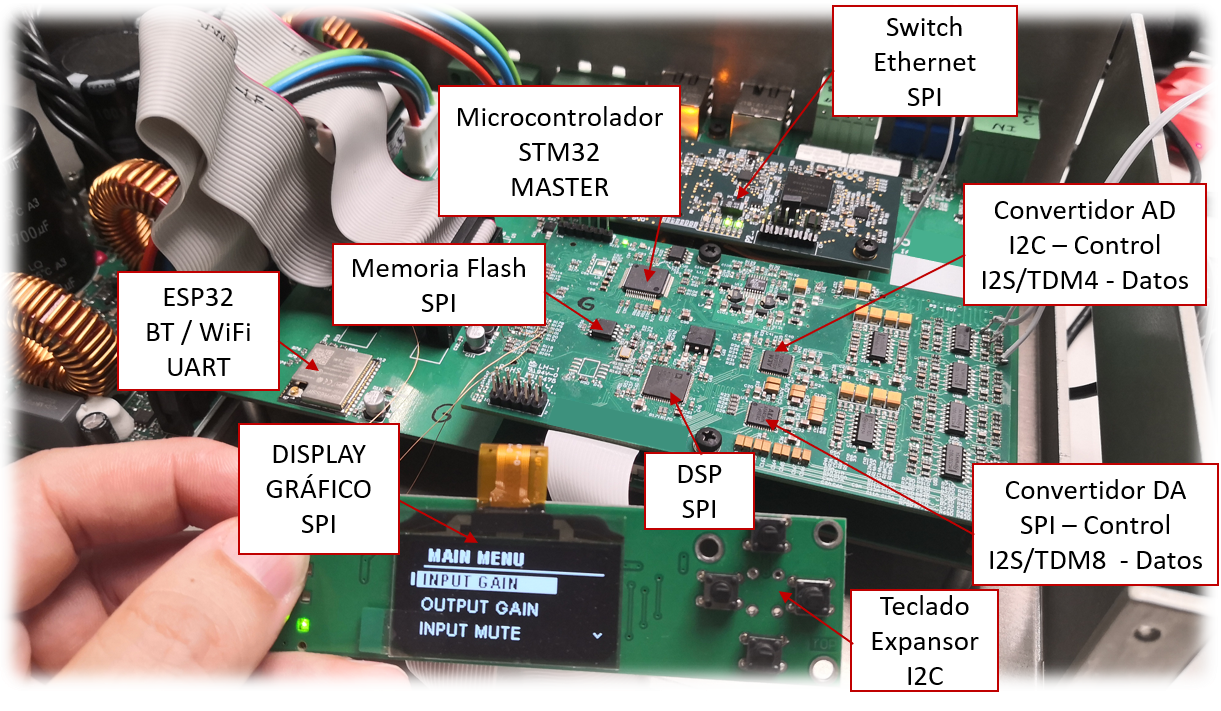
Comunicaciones Cableadas: Ejemplo
Comunicaciones Cableadas: UART
UART - Contenidos
UART - Definición y Señales
UART - Definición y Señales
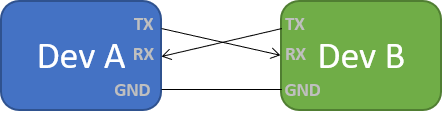
En su implementación más sencilla solo necesita dos líneas de datos (cables/pistas) y la referencia:
TX - Línea con los bits transmitidos. Del transmisor al receptor.
RX - línea con los bits recibidos. Provenientes del transmisor.
GND - Línea de masa con la referencia del voltaje, necesaria si transmisor y receptor no están dentro del mismo sistema.
UART - Definición y Señales - Trama UART
Al tratarse de una comunicación asíncrona es necesario que el dispositivo transmisor TX y el receptor RX trabajen a la misma velocidad de transmisión/recepción, los mismos baudios (símbolos por segundo).
En estado inactivo, las líneas de datos están a nivel alto "1".
Para coordinarse TX con RX, la tranmisión de la trama de datos empieza con un bit de START, seguido de los bits de datos enviados en serie, un bit opcional de paridad, y se termina con uno o varios bits de STOP.

UART - Definición y Señales - Trama UART
Sin transmitir la línea permanece a 1 lógico (3.3/5 voltios).
El flanco descendente del bit de START, es el momento de sincronización en el receptor y saber cuando debe muestrear el bit recibido, en Tbit/2. El receptor emplea un TIMER interno (contador) para saber cuando muestrear.
Se envían de 5 a 8 bits de datos, con el LSB primero.
UART - Definición y Señales - Trama UART
Opcionalmente puede haber un bit de paridad P configurable como even/odd.
Se termina la trama con 1 o varios bits de STOP.
Se repite todo el proceso para cada caracter de información enviado desde el TX al RX.
UART - Definición y Señales - Baudios y bits por segundo
La velocidad de trasmisión en baudios es de 1/Tbit.
La tasa de bits de información por segundo BPS (throughput) es:

UART - Definición y Señales - Baudios y bits por segundo
Las tasas de baudios habituales empleadas son: 50, 75, 110, 134, 150, 200, 300, 600, 1200, 1800, 2400, 4800, 9600, 19200, 38400, 57600, 115200.
Existen UARTS capaces de trabajar hasta el Megabaudio.
Puede emplearse cualquier tasa de baudios siempre que TX y RX se pongan de acuerdo. No recomendado salvo para valores empleados en estándares específicos como el MIDI que son 31250 baudios.
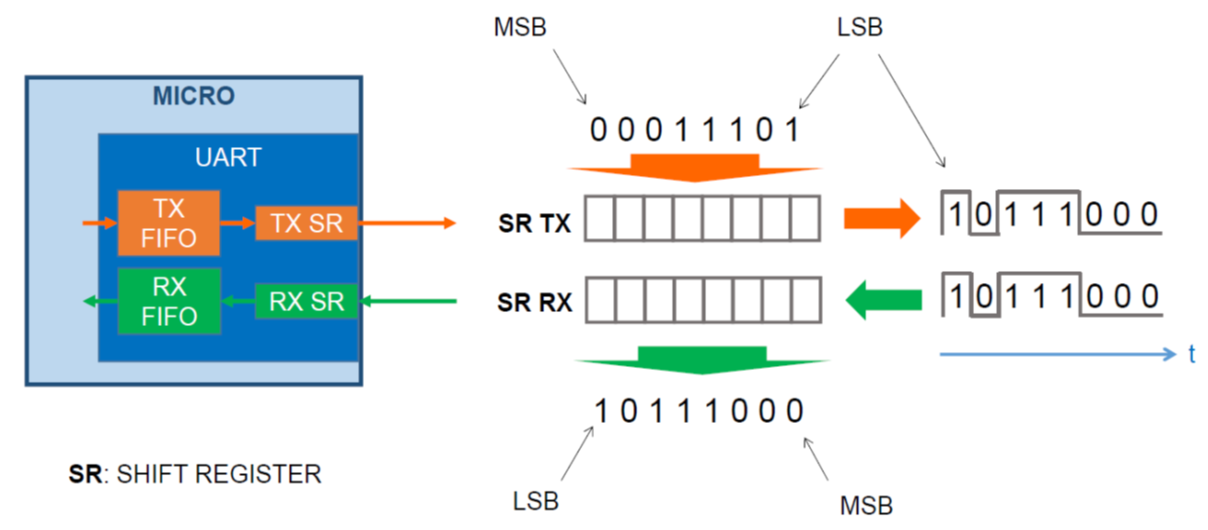
UART - Definición y Señales - Shift Registers
Envío/recepción de bytes: palabras de 8 bits que deben ser enviados/recibidos uno tras otro.
Uso de registros de desplazamiento Shift Registers SR en los microcontroladores que trabajan junto a FIFO: First In First Out de datos.
UART - Definición y Señales - Control de Flujo
UART - Definición y Señales - Control de Flujo
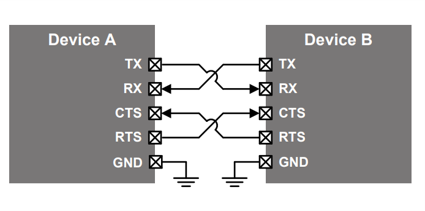
CON control de flujo por Hardware:
Se añaden dos nuevas líneas para notificarse entre TX y RX si están preparados.
RTS: Request To Send solicitud de envío. De TX a RX.
CTS: Clear To Send libre para envío. De RX a TX.
Este control requiere de líneas adicionales y ya casi no es empleado.
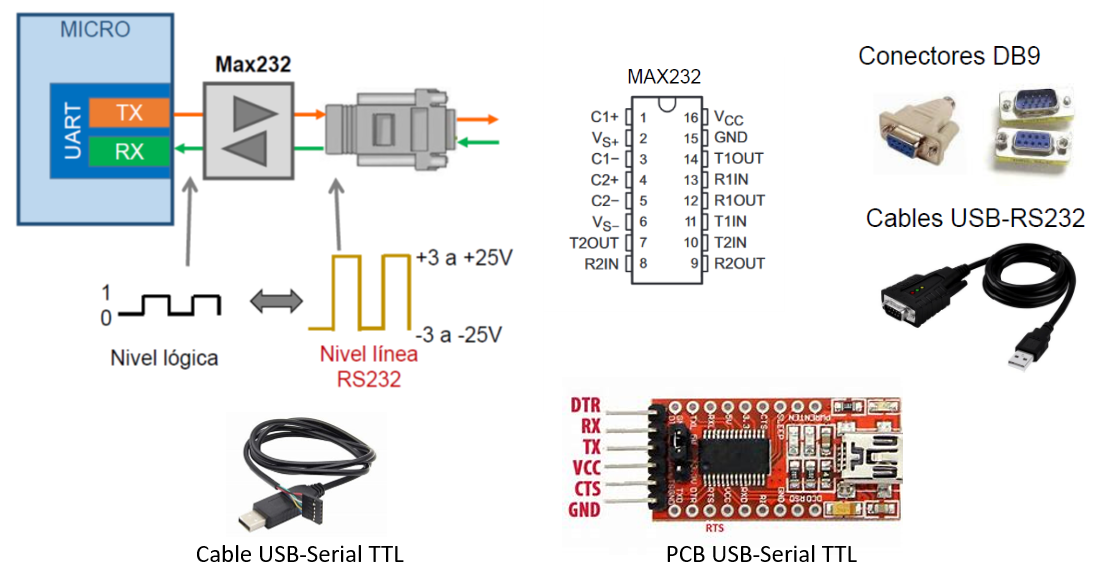
UART - Definición y Señales - Estándar RS232
UART - Definición y Señales - Estándar RS232
Los ordenadores ya no disponen de puertos RS232. Se emplean convertidores USB-Serial tanto en formato cable como PCB. Fabricante FTDI https://ftdichip.com.
UART - Definición y Señales - Estándar RS232
UART - Definición y Señales - Trama UART TTL
Captura con osciloscopio de una trama UART:
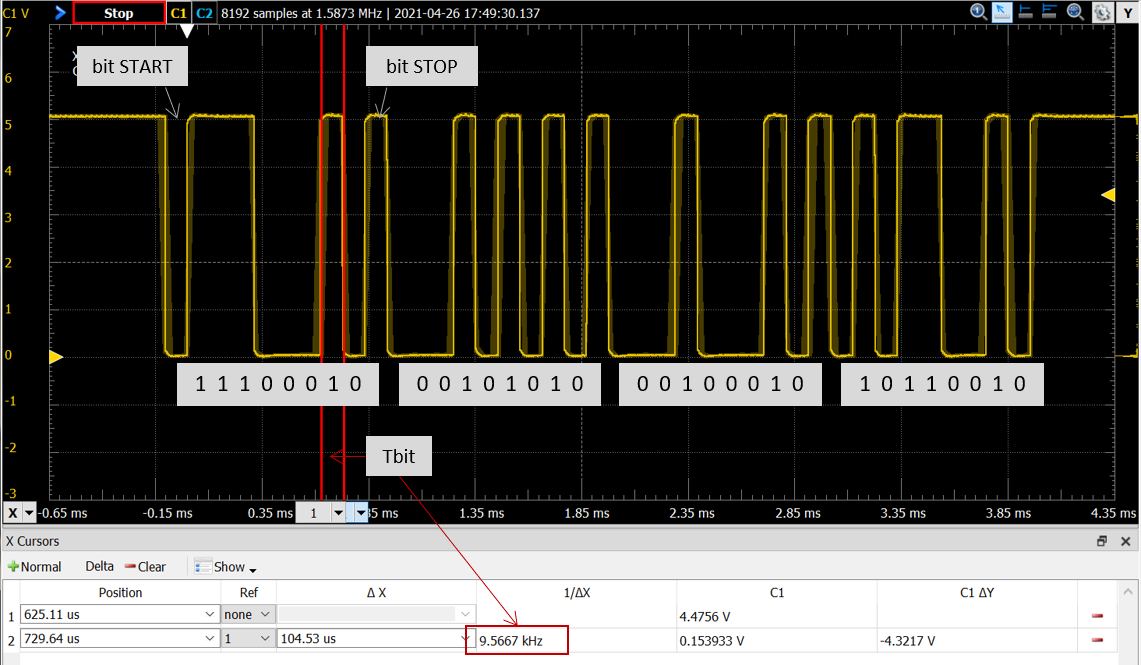
| Descifra el mensaje!!! |
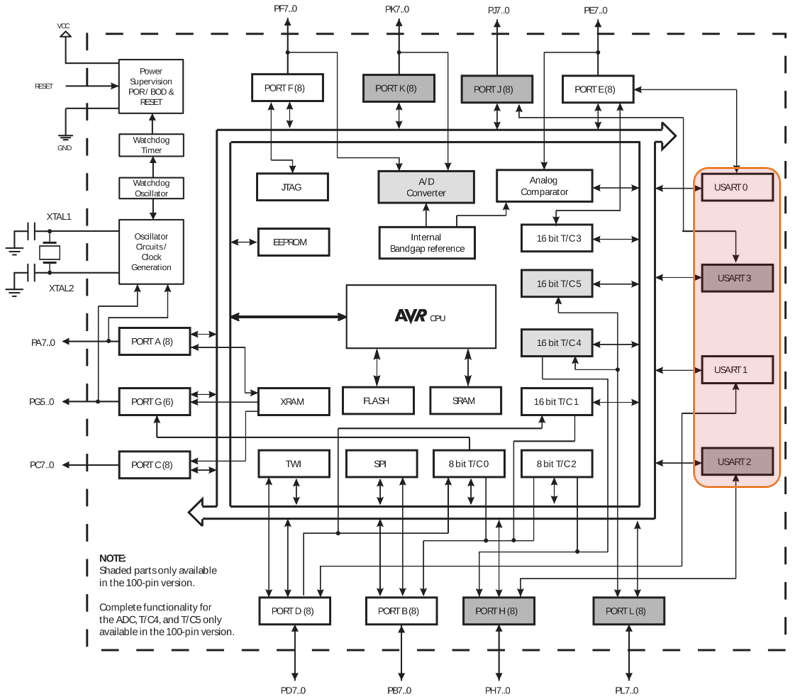
UART - Arduino Mega2560
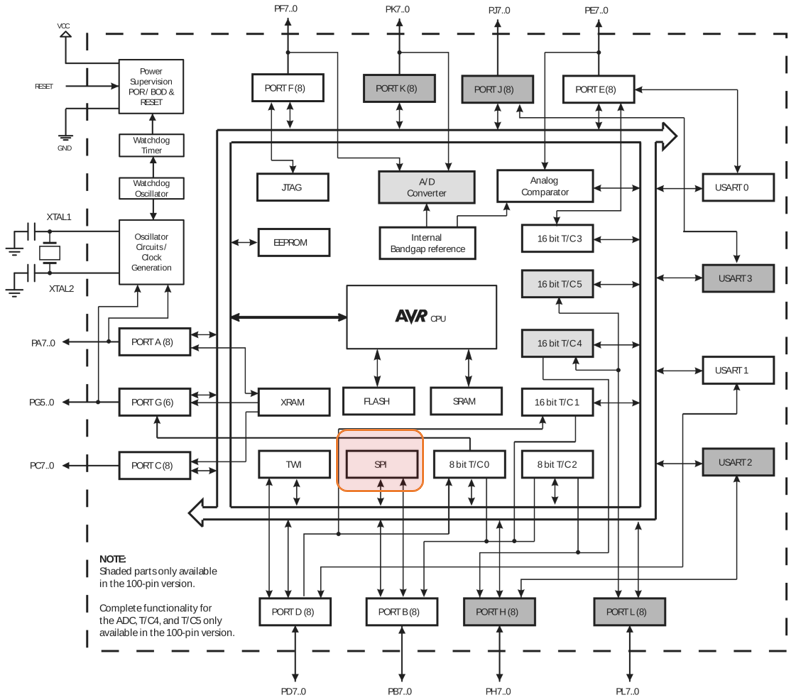
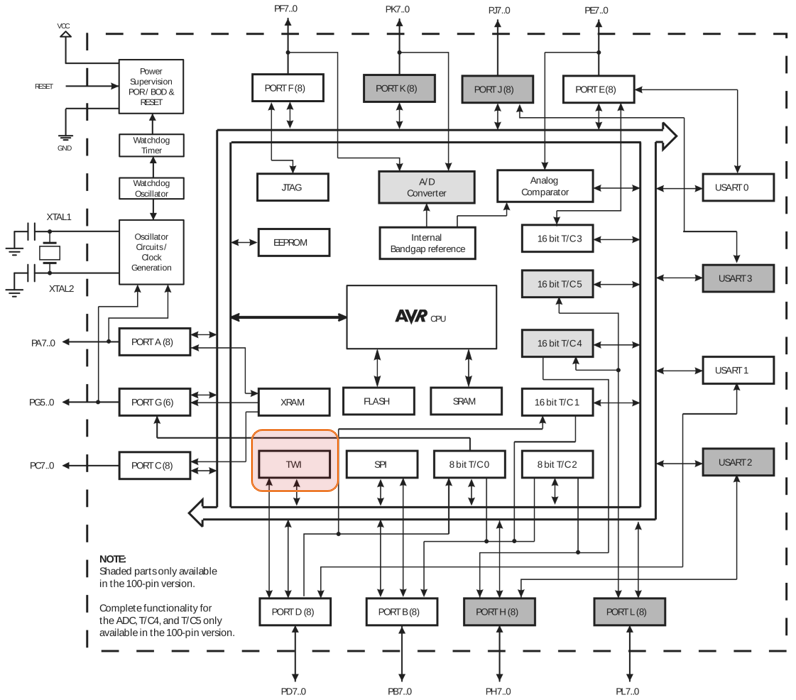
El microcontrolador AVR ATMega2560 dispone de 4 USART.
UART - Arduino Mega2560
UART - Arduino Mega2560
UART en Arduino Mega2560
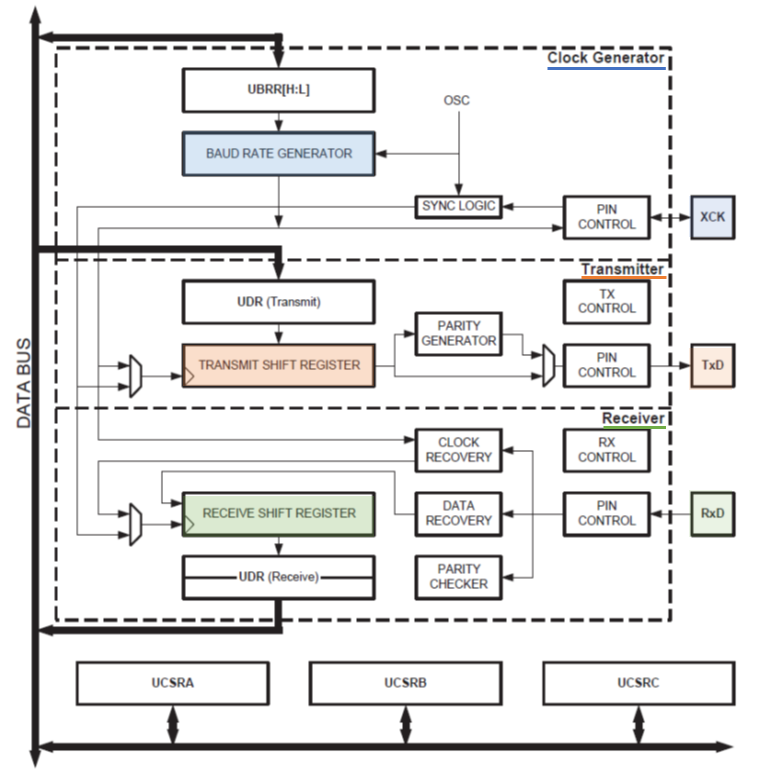
Diagrama de bloques USART
UART en Arduino Mega2560
Pines USARTs Mega2560
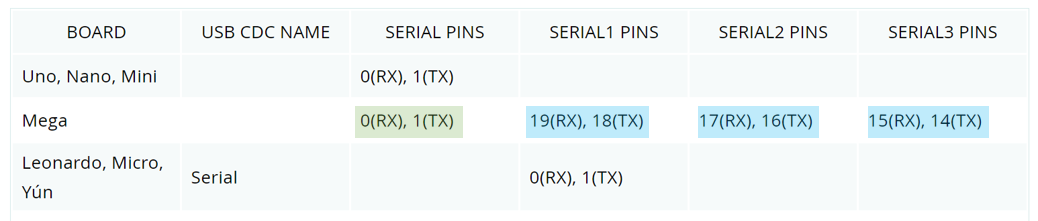
La USART (pines 0-RX y 1-TX) es la que a través de un Serial-USB se conecta la placa Mega2560 al ordenador.
UART en Arduino Mega2560
UART en Arduino - Librería Serial
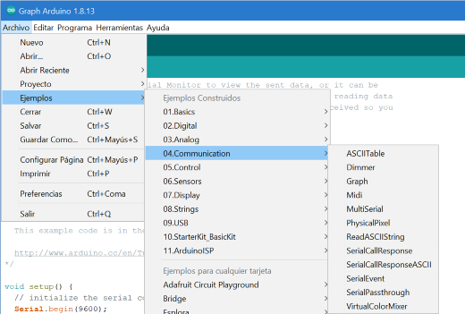
Arduino incorpora por defecto la librería Serial para trabajar de forma sencilla con las UARTs sin tener que configurar uno a uno los registros de control y declarar funciones de interrupción.
La librería Serial ofrece diversos métodos para su configuración, lectura, escritura, chequeo, etc. Podrá encontrar ejemplos funcionales desde Arduino IDE en:
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en Arduino - Métodos de Serial
UART en el Ordenador - Dispositivos
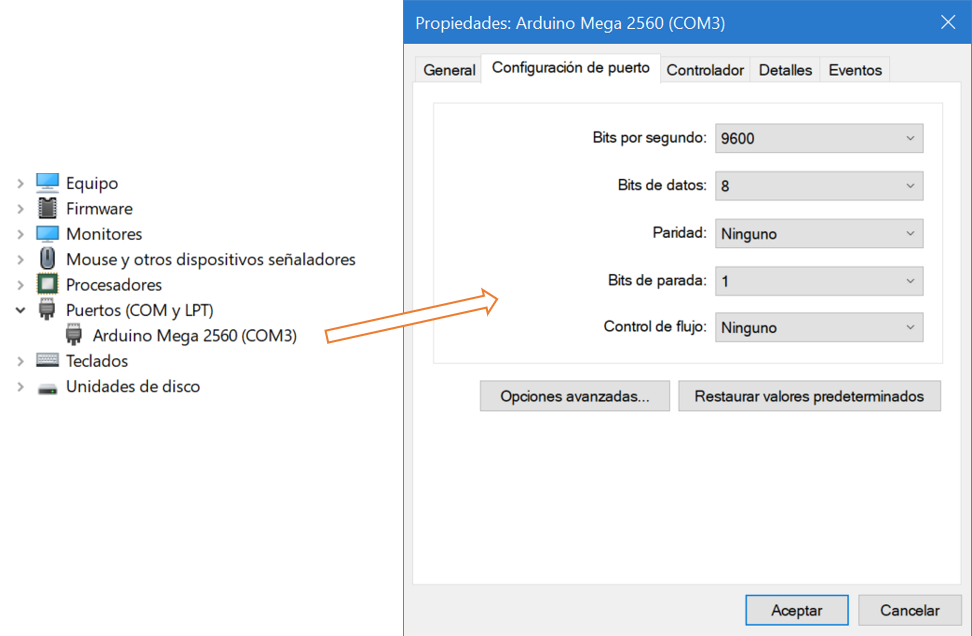
UART en el Ordenador - Dispositivos
Ejemplo propiedades Arduino Mega 2560
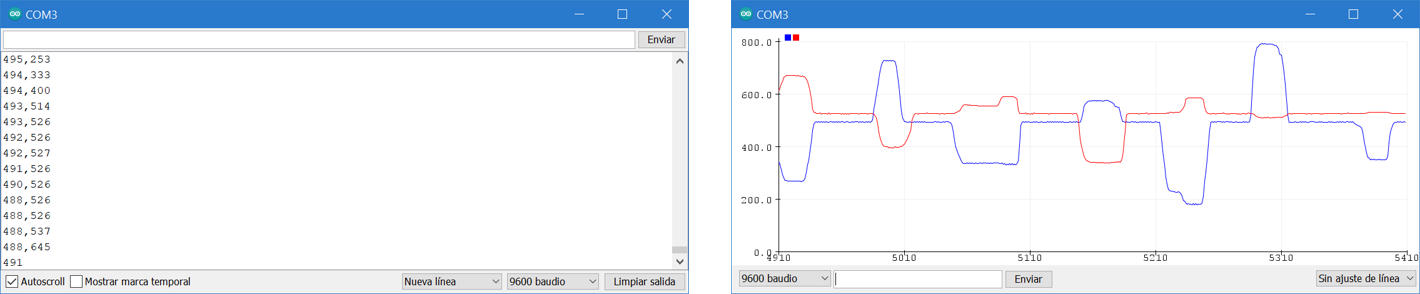
UART en el Ordenador - Terminales - IDE
Arduino IDE incorpora un terminal de comunicación muy sencillo (Herramientas / Monitor Serie) que muestra la información recibida desde la placa, y permite enviar información a la misma.
Permite únicamente seleccionar la velocidad en baudios y la posibilidad de incorporar saltos de línea y/o retornos de carro.
Además incorpora un monitor gráfico (Herramientas / Serial Plotter) que muestra una gráfica de valores recibidos respecto al tiempo.
Pueden enviarse varios valores separados por "," para mostrar distintas gráficas.
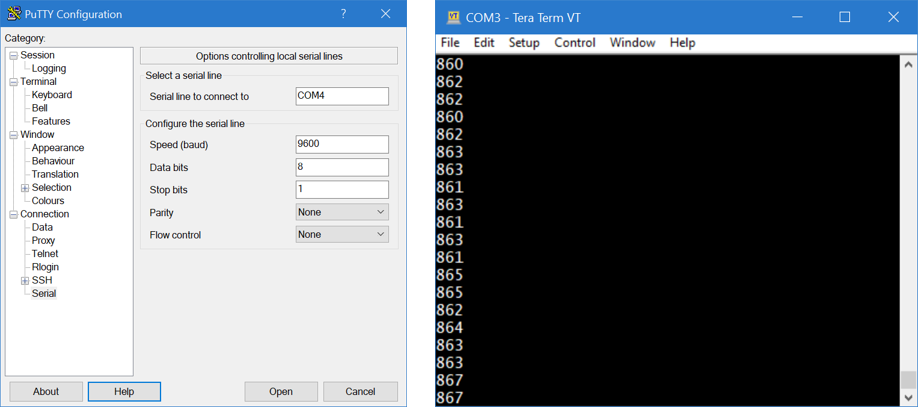
UART en el Ordenador - Terminales - Otros
Existen multitud de programas de Terminal para la comunicación serie desde/hacia el ordenador y los sistemas embebidos.
Todos ellos permiten seleccionar el puerto COM y su configuración, así como mostrar los datos recibidos en diversos formatos (bytes, ASCII), grabación a disco, envío de ficheros, etc.
UART en el Ordenador - Programación Python
UART en el Ordenador - Programación Python
UART en el Ordenador - Programación Python
UART - EJEMPLO PERIFÉRICO - Módulo Bluetooth
UART - REFERENCIAS
Comunicaciones Cableadas: I2C
I2C - Contenidos
I2C - Definición y Señales
I2C - Definición y Señales
Para no pagar regalías, ATMEL (hoy en día Microchip) desarrollo el TWI Two Wire Interface, prácticamente idéntico. Otros fabricantes como Analog Devices emplearon también el TWI. I2C = TWI
La patente del I2C caducó en 2006 por lo que ya no hay derechos sobre el interfaz, quedando la protección actual únicamente sobre el logotipo.
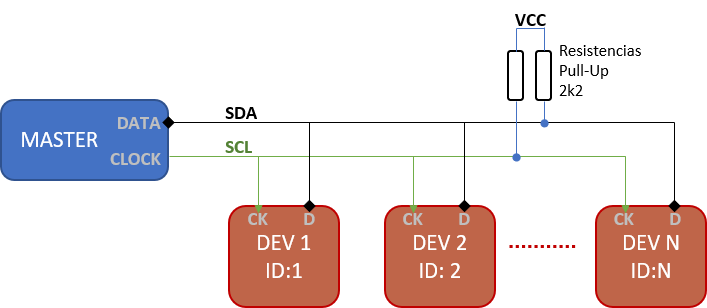
I2C - Definición y Señales
Solo necesita 2 señales para funcionar:
SDA: Serial DAta. Línea de datos TX y RX alternada en el tiempo.
SCL: Serial CLock. Línea de reloj para el avance de los datos.
I2C - Definición y Señales
I2C - Definición y Señales - Usos del I2C
I2C - Definición y Señales - Usos del I2C
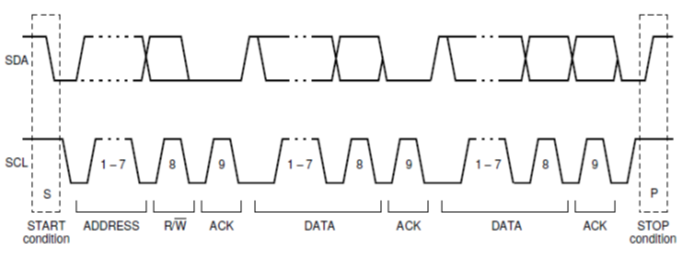
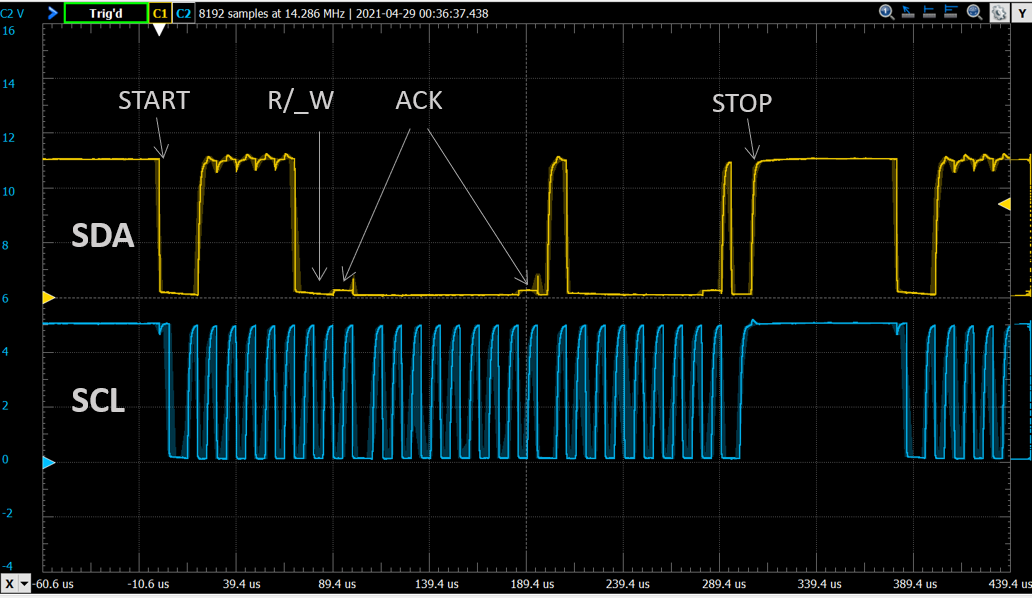
I2C - Definición y Señales - Condiciones START y STOP
Los datos en SDA deben estar estables en el semiciclo con SCL=1.
Los datos en SDA deben cambiarse en el semiciclo SCL=0.
La comunicación es en múltiplos de bytes, con el MSB primero.
La comunicación empieza con la condición de START: transición 1 a 0 de SDA con SCL=1.
La comunicación termina con la condición de STOP: transición 0 a 1 de SDA con SCL=1.
Cada byte es seguido por un bit de reconocimiento ACK Acknowledgement poniendo a 0 SDA el receptor.

I2C - Definición y Señales - Trama completa
I2C - Definición y Señales - Trama completa
Transferencia completa
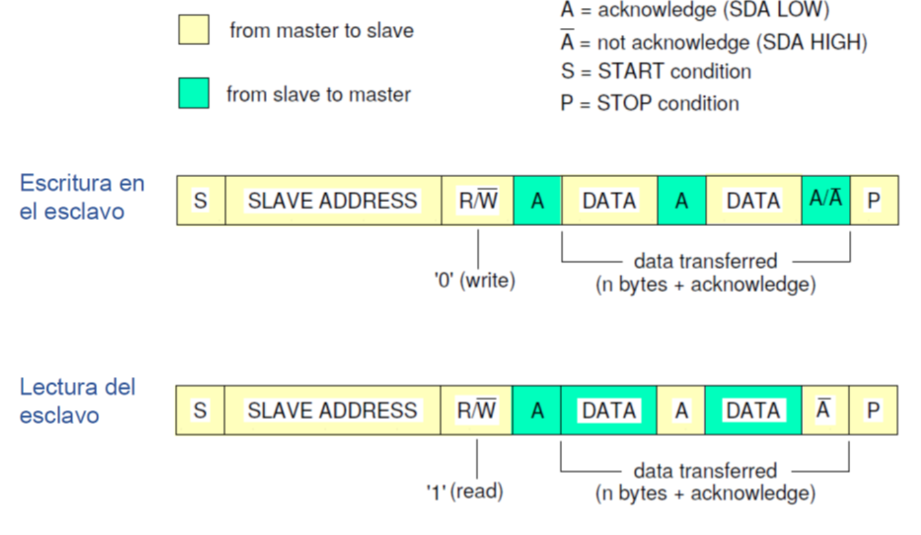
I2C - Definición y Señales - Tramas R/_W
Tramas de lectura y escritura
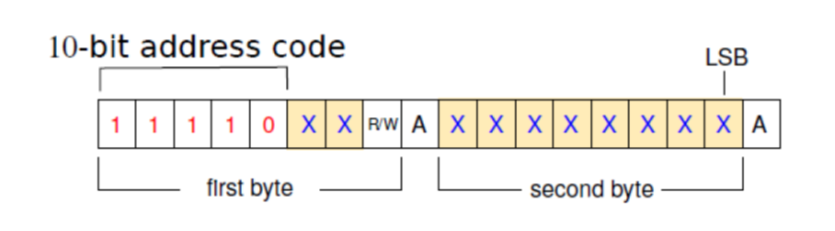
I2C - Definición y Señales - Direcc. 10 bits
Para dispositivos I2C con direcciones de 10 bits:
Se envía 1111 seguido de los dos primeros bits de la dirección y el bit de R/_W.
Se envían los 8 bits restantes de la dirección en el siguiente byte.
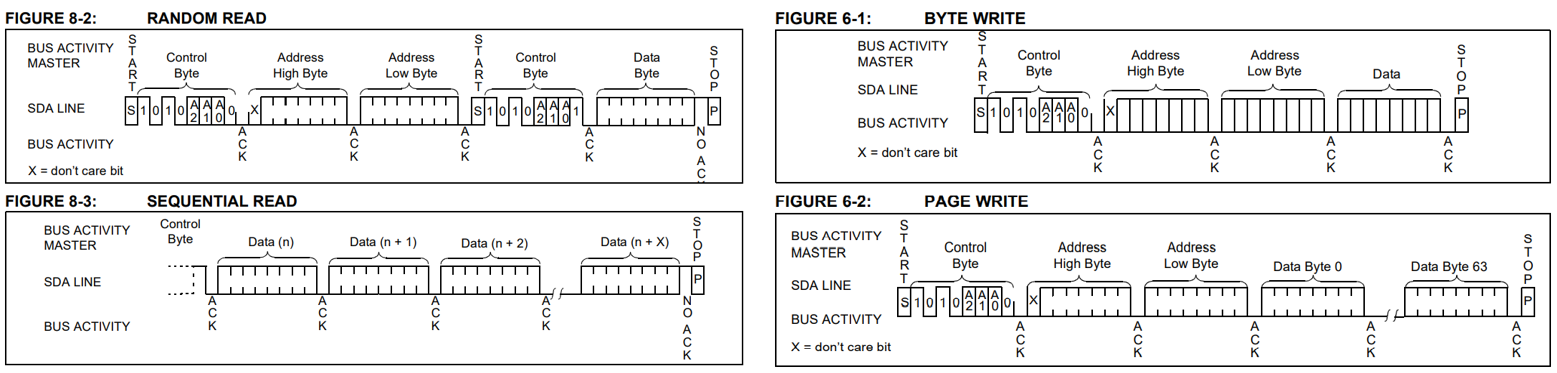
I2C - Definición y Señales - Ejemplo Memoria Flash
I2C - Definición y Señales - Ejemplo Memoria Flash
Permite realizar lecturas contiguas sin tener que volver a direccionar. El Master genera un ACK para pedir el siguiente byte.
Permite realizar escrituras contiguas (hasta una página de 64 bytes) sin tener que volver a direccionar. Se termina con STOP.
I2C - Definición y Señales - Ejemplo Trama LCD
#define LCD_I2C_ADDR 0x3E
I2C - Arduino Mega2560
I2C - Arduino Mega2560
I2C - Librería Wire de Arduino
I2C - Librería Wire de Arduino - Funciones
I2C - Librería Wire de Arduino - Funciones
I2C - Librería Wire de Arduino - Funciones
I2C - Librería Wire de Arduino - Funciones (II)
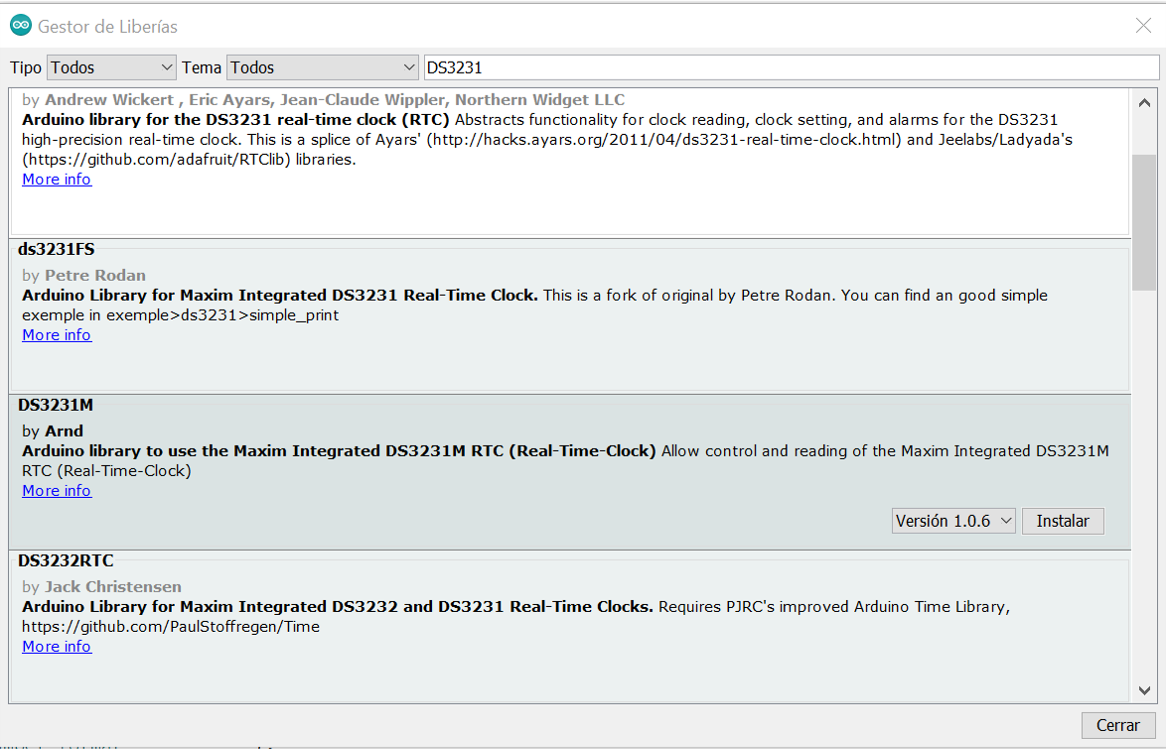
I2C - Ejemplo RTC DS3231 - Librerías
I2C - Ejemplo RTC DS3231 - Librerías
I2C - Ejemplo (Prácticas)
I2C - Referencias
Comunicaciones Cableadas: SPI
SPI - Contenidos
SPI - Definición y Señales
SPI - Definición y Señales
El bus mínimo consta de 4 líneas:
SCK: Serial CLock. Señal de reloj que gobierna el Master.
MOSI: Master Output Slave Input. Datos de Master a Slave. Se debe conectar a la entrada SDI (Serial Data Input) de los slaves.
MISO: Master Input Slave Output. Datos de Slave a Master. Se debe conectar a la salida SDO (Serial Data Output) de los slaves.
CS: Chip Select. Señal de selección de cada slave normalmente activa a nivel bajo. También llamada SS (Slave Select).
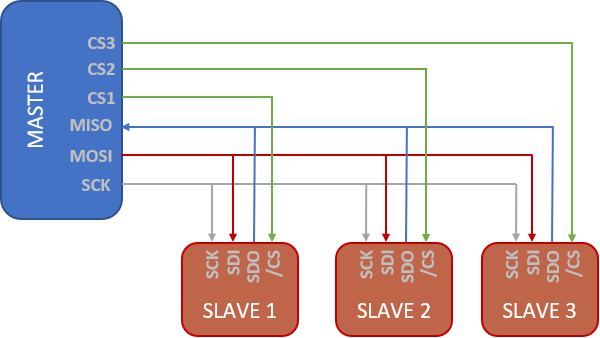
SPI - Definición y Señales
SPI - Definición y Señales

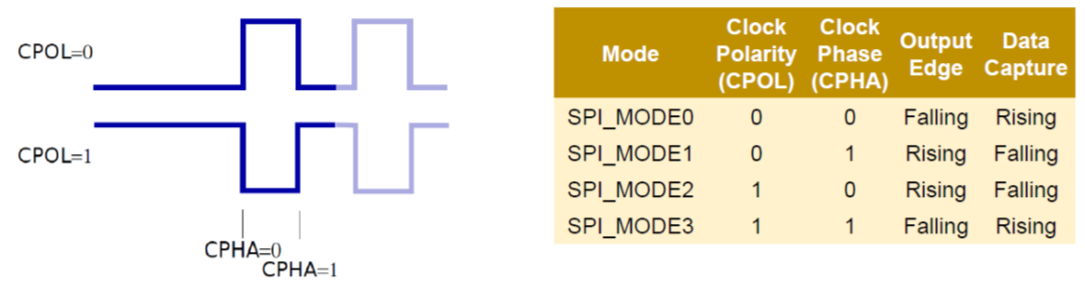
SPI - Modos
SPI define 4 modos de trabajo en función de:
Polaridad de SCL. CPOL.
Flanco de reloj activo, 1º o 2º. CPHA.
Configurar master y slave en el mismo modo.
Los modos 1 y 3 son los más empleados.
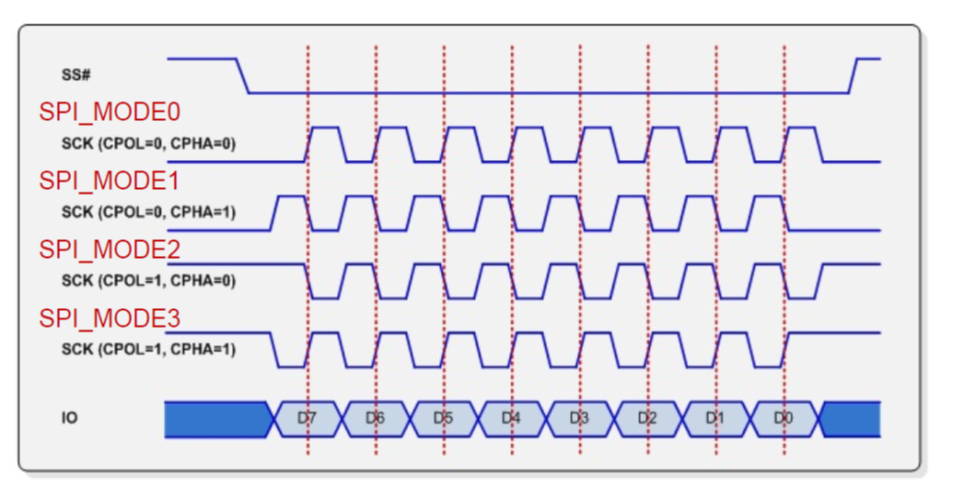
SPI - Modos
Comparación señales en modos 0 a 3
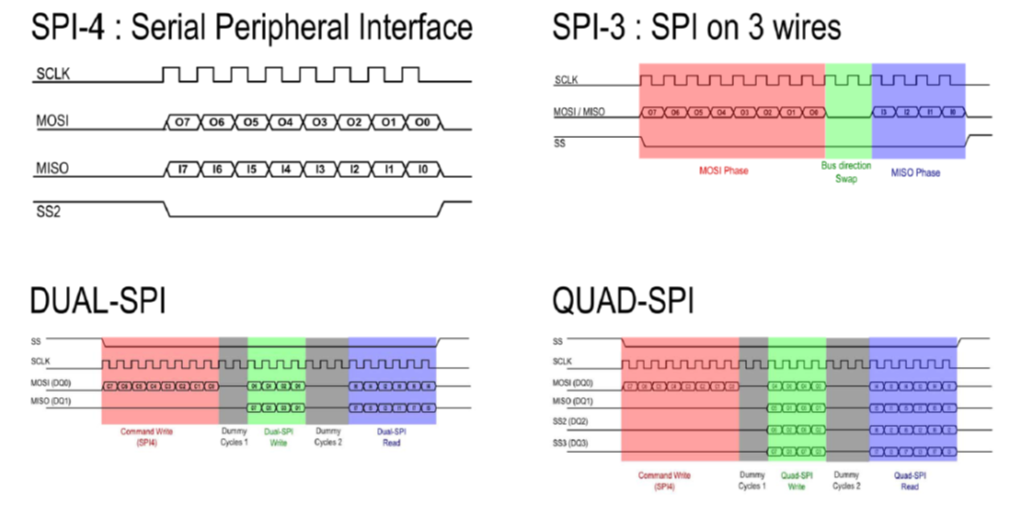
SPI - Variantes
SPI - Variantes
SPI - Arduino Mega2560
SPI - Arduino Mega2560