 |
Fig 1: Esquema básico de navegación |
Entrando en el campo de la psicología
Principalmente una representación del entorno, un mapa, debe cumplir algunas características, entre ellas (y salvando el primer principio de la subjetividad *) podemos encontrar las siguientes:
Entrando en el campo de la psicología
Estas características tienen una analogía, casi directa con términos muy empleados en psicología:
Característica |
Equivalente |
Jerarquía orientada a destacar lo importante y descartar lo supérfluo. |
Atención frente a la información que los sentidos proporcionan |
Organiación |
Decisión |
Almacenmiento de las características |
Memoria |
Flexibilidad |
Adaptación al medio. |
Esto hace que se deba tener en cuenta los múltiples estudios en psicología y etología que se llevan haciendo desde hace más de un siglo. Algunas obras [1] incluyen los grafos y los algoritmos de tratamiento de datos en sus experimentos sobre memoria y representación del conocimiento [7].
Desde los primeros tiempos de la robótica [2], se ha sido consciente de la analogía "ser vivo - máquina".
Desde mi punto de vista, es muy probable que todavía quede bastante por 'mezclar' de las dos disciplinas anteriores con la robótica. El comportmaiento de los animales, condicionado por el aprendizaje que llevan haciendo del entorno durante algunos millones de años, puede aportar pistas muy interesantes para la integración o la orientación de los sistemas móviles.
Conforme la interacción en espacio, objetivos y trabajo de máquinas y hombres vaya aumentando, las posibles distinciones entre las disciplinas antes mencionadas irán reduciéndose.
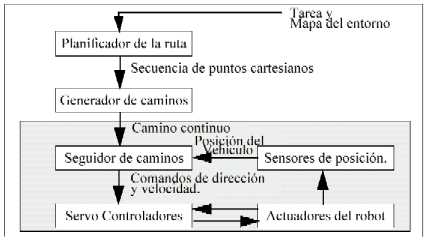
La aparición de los mapas en la robótica móvil, es tan antigua como la propia ciencia. El primer paso en cualquier trabajo de navegación consiste en la creación de la representación del mundo [12]:
|
Fig 1: Esquema básico de navegación |
En la siguiente figura, se puede apreciar cómo un avance en la navegación, es la actualización del entorno
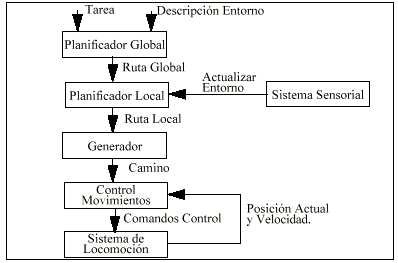 |
Fig 2: Navegador implantado en el robot móvil Blanche de AT&T. |
En la anterior figura, al robot se le pasa una descripción (mapa) del entorno de trabajo, que por medio del sistema sensorial, se actualiza con los posibles cambios del entorno.
En ciertos casos, el mapa pasa a ser local, en este caso, el robot Navlab II que se desenvuelve en entornos exteriores, donde el mapa global pierde importancia. Este mapa local va 'construyendo' el camino a medida que se va moviendo, es decir, mientras el robot se acerca a su objetivo, va generando el mapa por donde debe pasar.
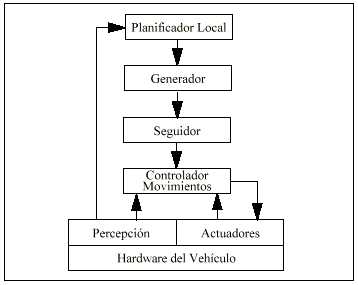 |
Fig 3: Navegador local implantado en el Navlab II de CMU. |
Cabe destacar que el anterior modelo no tiene un mapa global ni un modelo del mundo. Realmente lo que tiene el robot es un modelo de la reacción hacia lo que el entorno puede depararle, pero los detalles en los que se desenvuelve, no los almacena. Si el robot se moviese en un camino de tierra, dicho camino, después de una tormenta, contendrá charcos que no se puedan pasar, zonas de barro que deben ser tratadas con cuidado y otros obstáculos imprevisibles. En los casos anteriores de nada sirve saber que hay un camino si no se sabe andar por los distintos estados que éste puede tomar.
A continucación se exponen algunas clasificaciones obtenidas de artítculos de distintos autores. Por supuesto, entrar en taxonomías de representaciones no tiene más interés que el puramente organizativo. De hecho, las tendencias actuales, apuestan por representaciones que no se incluyan en sólo uno de los tipos.
En un principio, los mapas que se emplean en la navegación y posicionamiento pueden dividirse en varios tipos, de entre ellos, se pueden distinguir dos tendencias principales**: [4]
Como representantes clásicos de los mapas geométricos están las retículas (grids) o mapas basados en cuadrículas.
Los mapas basados en cuadrículas [3] representan el entorno por medio de una matriz (bidimensional en la mayoría de ocasiones) en la que las celdas representan una porción geométrica del espacio. De estos mapas se pueden extraer algunas aracterísticas:
- Permite el uso de algoritmos rápidos en lo que tiempo de cómputo se refiere.
- Aunque da la misma importancia a todas las zonas del espacio, esto no es problemático si se va a trabajar en todo él, como ocurre en el trabajo en interiores.
- Limita la cantidad de información a representar, pero en espacios interiores, esta cantidad suele ser limitada.
- El almacenamiento en este tipo de representaciones no es muy eficiente, en lo que a espacio de memoria se refiere.
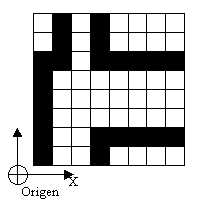
Unnejemplo clásico de grid, es el mapa básico de obstáculos, en el que cada celda del entorno puede tomar dos estados: ocupada (o lo que es lo mismo, con un obstáculo) o libre:
|
|
|
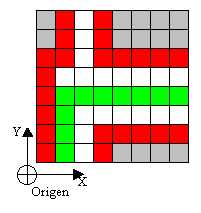
| Con un sólo bit por celda, ya se puede representar, en una matriz, un espacio con las propiedades de camino libre o camino con obstáculos. | Con dos bits de reslolución por celda, ya se pude marcar los obstáculos (rojo), las zonas libres (blanco), las zonas desconocidas (gris) y el camino o ruta que va a llevar el robot (verde) | |
|
|
|
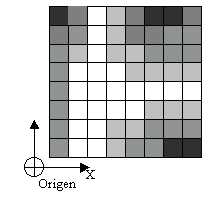
| Conforme se aumenta la profundidad de resolución de la cuadrícula, los detalles de entorno que se pueden representar, van aumentando. | A medida que se añade información a cada celda, se puede representar un mapa, no sólo tridimensional, sino que con añadidos de atributos del entorno [16]. |
Realmente en los sistemas que deben circular en interiores, donde la representación por mapas sigue teniendo bastante campo, ya que las características de éstos (navegación por el mapa completo, posibilidad de marcar el terreno fácilmente y entornos limitados y conocidos) hacen que los mapas reticulares sean todavía empleados.
Otros mapas topológicos más complejos que las retículas, son los mapas de polígonos, de líneas o incluso los mapas de elementos, en algunos sistemas se está integrando la navegación por mundos virtuales descritos en VRML [5]..
Los mapas toplógicos representan el entrono por medio de las relaciones geométricas de los componentes del mismo y algún punto de referencia. La estructura de datos representativa de este método, es un grafo (de cualquiera de los múltiples tipos que existen de los mismos), en el que los nodos representan características del mundo, tanto físicas como de cualquier otro tipo, y los arcos representan las relaciones entre los mismos.
Suele ser un ejemplo clásico de mapas topológicos las representaciones jerárquicas del entorno [6] donde se pueden observar mayores similitudes con los estudios realizados sobre la representación del conocimiento [1] (p. 119-125).
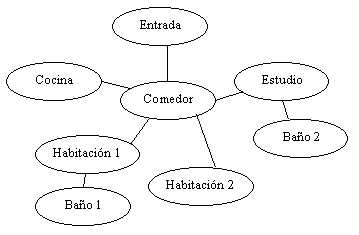
|
| Ejemplo de cómo se puede emplear un grafo de ocho nodos (de igual pesoen este caso, ya que todos representan habitaciones) para representar una casa. En el ejemplo, los arcos representan el camino posible entre una habitación y otra. |
En la figura de arriba, se aprecia cómo se puede, con cierta facilidad, modelizar un entorno con un grafo, la propiedad de los arcos de servir de nexo entre habitaciones, hace que sea relativamente sencillo trazar trayectorias entre las mismas, para ir del estudio al baño 1, se debe pasar por el comedor y la habitación 1.
En este tipo de grafos, la concreción se encuentra dentro de cada nodo, aunque por medio de grafos paralelos, se puede aumentar el nivel de detalle del mapa [6]
Es evidente que lo ideal es combinar ambos tipos de representaciones, (aprovechando las ventajas, claro). Un buen ejemplo de esta combinación de tendencias, lo podemos encontrar en [22] donde se emplea un mapa topológico, realimentado a partir de características métricas.
Paolo Pirjanian, Henrik L. Christensen. [23]
Estos autores, clasifican el modelo del entorno en dos tipos distintos:
- On-line (algo así como el entorno cercano (espacialmente) o reciente (temporalmente)
- Prior models (modelos previos o fijos)
Los modelos on-line son modelos actuales temporalmente, es decir por donde el robot ha pasado recientemente o el modelo que los sensores en un momento concreto están captando. Es el modelo que representa la realidad actual en la que se mueve el robot.
Los modelos previos, son aquellos que almacenan la estructura del entorno que se suponen invariables, por lo menos durante el desarrollo de la misión del robot. Esta información puede ser muy útil para el autoposicionamiento del robot, o la calibración odométrica del mismo.
Para la navegación real de los robots, podemos encontrar que lo mejor es emplear una representación híbrida de estos dos tipos de mapas. Estas representaciones se pueden clasificar en tres tipos:
Los mapas simbólicos, son las clásicas rejillas de ocupación [24], que representan el espacio por medio de una analogía de casilla ocupada-desocupada, o bien de la probabilidad de encontrar un obstáculo en una de ellas en función de lo que las adyacentes (temporal o espacialmente) tuviesen [16]. Estos métodos tienen la ventaja de ser eficientes para la determinación de trayectorias locales [25] y el empleo de las técnicas basadas en sonar [26]. La dificultad de este tipo de mapas, está en la representación simbólica de los objetos (qué son), y en la variabilidad del entorno: mover un mueble de sitio, puede provocar una auténtica revolución en dos partes del mapa.
La representación geométrica, puede ser realizada de una gran cantidad de maneras. Desde una representación sencilla a partir de líneas [27] (sobra con dos puntos por línea, claro), hasta representaciones basadas en planos CAD o entornos de realidad virtual [3]. La gran ventaja de este tipo de represntación es la facilidad de transformar el modelo en un camino para la navegación. En VRML, se puede especificar un cubo como tal (es decir un sólo objeto, un dato) o cómo un conjunto de ocho vértices; evidentemente, la primera de las represntaciones es útil para una navegación rápida y la segunda para un trabajo fino con el objeto, pues se conoce a la perfección las ocho coordenadas de los vértices.
Los modelos semánticos, se forman a pertir de una estructura en red (grafo), que representa el entorno. Este método implica la dificultad de almacenar la información odométrica del espacio, ya que se priva (por norma) de características métricas a los grafos, aunque eso no siempre es así. La gran cantidad de trabajos [6] [15] [17] [20] [23] al respecto de representaciones semánticas, y de lógicas de primer orden hacen que este tipo de representación sea una posible buena salida. De todas maneras, actualmente, se piensa que añadir la información de los sensores a los grafos, es una labor complicada, así como extraer la información de los mismos para una navegación inmediata. Sobre esto último, cabe preguntarse si cuando un animal huye de un ataque hace referencia al mapa que el conozca del terreno, o se limita a evitar los obstáculos.
Juán A. Fernández, Javier González [6]
Desde el punto de vista de los autores, se
- Representaciones basadas en características
- Representaciones basadas en mallas
- Representaciones relacionales
Las representaciones basadas en características son modelos del mundo basados en las características proporcionadas por los sensores del robot, estas características se emplean para determinar las posibles rutas por donde se puede mover el robot, también se emplea para determinar la posición del robot en un momento concreto.
Los mapas basados en mallas, o rejillas de probabilidad, son las evidence grids referidas posteriormente. se basan en dividir el entorno, en zonas que se marcan en función de la probabilidad de que en ellas haya o no un objeto.
Los mapas basados en relaciones son mapas basados fundamentalmente en grafos, intentan evitar el error que se obtiene de otras representaciones, el modelo almacena las relaciones entre marcas, almacenando la información métrica correspondiente.
Los mapas pueden estar basados en cualquiera de las tres representaciones anteriores o pueden ser combinaciones de las anteriores, un trabajo en que se modelan mundos a partir de combinaciones de representaciones anteriores [28].
También tienen cierto interés las clasificaciones de Kuipers, que dividen las representaciones en una jerarquía de cinco niveles, basados en los cinco niveles de habilidades y razonaimento humano [29]:
| Sensorial - motor |
| Control |
| Causal |
| Topológico |
| Métrico |
* "Ni son todos/as los/as que están, ni están todos/as los/as que son".
** También se tienen algunas representaciones poco clasificables (aunque muy interesantes en algunos casos), como los trabajos de Brooks [13] o los mapas virtuales [14].
*** A falta de nombres para dar a cada tipo de clasificación, he optado por emplear los de los autores que firman los artículos de los que he obtenido las mismas.